������ƪ�ɼ�������ѧԺ Zongyi Li��Anima Anandkumar���Լ��նɴ�ѧ��Purdue University��Kamyar Azizzadenesheli �����ύ�����ģ�Ŀǰ���ڽ��� ICLR 2021 �������ġ�
�������ĵ�����֮һ Anima Anandkumar �Ǽ�������ѧԺ���ڣ�Ҳ��Ӣΰ�����ѧϰ�о��ĸ����ˡ�
����
������ͳ�����ϣ���������Ҫѧϰ����άŷʽ�ռ�֮���ӳ�䡣���ڣ���һ�������ƹ㵽�����ӣ�����Ҫѧϰ�����ռ�֮���ӳ�䡣����ƫ�ַ��̣�PDE�����ԣ�������ֱ��ѧϰ���⺯���������������ӳ�䡣���������һ������ʵ���ľ��䷽����ͬ��������ѧϰ���� PDE ���塣
�������գ����Լ�������ѧԺ���նɴ�ѧ���о���ͨ��ֱ���ڸ���Ҷ�ռ��жԻ��ֺ˽��в��������������µ������ӡ�������Ҷ�����ӣ�FNO��������ʵ�ֱ�����ǿ�Ҹ�Ч�ļܹ���
����
�������ĵ�ַ��https://arxiv.org/abs/2010.08895v1
�����о���Ա�ڲ���˹���̣�Burgers�� equatio��������������Darcy flow������ά - ˹�п�˹���̣�Navier-Stokes equation���Ͻ���ʵ�飬FNO ��Խ���е������緽��ȡ���� SOTA ���������봫ͳ�� PDE �������ȣ����ٶȿ���������������
���������� PDE��
������ѧ����ѧ�е��������ⶼ�漰���ijЩ�����IJ�ֵͬ������⸴�ӵ�ƫ�ַ��̣�PDE��ϵͳ��������Ӷ���ѧ������ѧ�ȡ�����ϵͳͨ����Ҫ��ϸ��ɢ�����Բ�����Ҫ��ģ��������ˣ���ͳ������Ԫ����finite element method��FEM��������ַ���finite difference method��FDM���ٶȽ�������ʱЧ�ʵ��¡����磬����ƻ���֮��IJ���ʱ��������Ҫ�����ص������⣬������Ҫ��ǰ��ģ�ͽ�����ǧ���������Դˣ�����һ�ֿ��ٽ������ķ�����
��������ѧϰ����ͨ���ṩ�����ڴ�ͳ�����Ŀ������������Ϊ���������ѧѧ�ƵĹؼ����ڡ����Ǿ������������������ά�ȵĿռ�֮�����ӳ�䣬�������ֻ��ѧϰ���ض���ɢ����صĽ�������ʵ��Ӧ����ͨ�����˷���������Ǹ���Ҫ����mesh-invariant ��������
�����ڸ������У��о������ȸ��������ֻ����������������� PDE ����������ά���Ӻ��� FEM��Neural-FEM����
������������
��������ά���ӷ����������Ӳ�����Ϊ����άŷ����ÿռ�֮�����Ⱦ������硣���ն��壬����������Ƕ����� mesh �ģ�������Ҫ��Բ�ͬ�ķֱ��ʺ���ɢ�������ĺ͵�������ʵ��һ�µ���������ܵĻ��������⣬��Щ����������ѵ�����ݵ���ɢ����ģ�ͼ�����״��������������µĵ��ҵ��⡣
��������ƪ��������ķ������෴��������������ֱ��ʾ߱������ԣ����ܹ��� mesh ֮�䴫�ݽ⡣
����Neural-FEM
����Neural-FEM �������⺯��ֱ�Ӳ�����Ϊ�����硣�÷���ּ��Ϊ PDE ���ض�ʵ����ģ�������ǽ����ӡ����߱� mesh �����Բ���ȷ�����Ƕ��ں������� / ϵ�����κθ�����ʵ����������Ҫѵ���µ������硣
�������ַ����뾭�䷽����������Ԫ�����dz����ƣ���������ռ����ֲ����������������Է�Χ��Neural-FEM ���������ļ�������Ҳ�뾭�䷽����ͬ��ÿ����ʵ������Ҫ����Ż����⡣���⣬�÷����������ڴ����ã����� PDE ��֪��
���������
�������о����һ���ܹ�ѧϰ����ά�����ռ�֮��ӳ����������ѧϰ�ܹ���������Ҷ�����ӣ�ͨ������Ҷ�ռ��е����Ա任ʵ�����������ӣ��μ�ͼ 1a����
����
�������о�����Ҫ�����У�
��������Ҷ�����ӷ���������ͬ��ѧ�����������������ڼ���Ŀ�������������ռ���ʹ�õ���ɢ���ء�
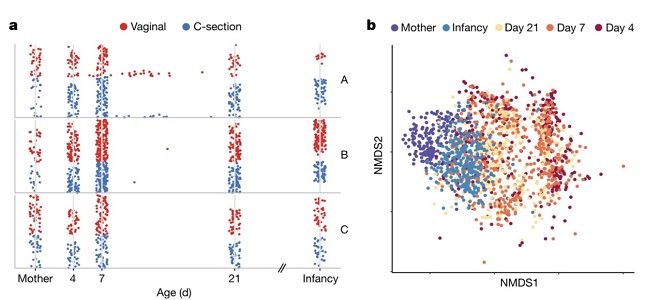
�������� parametric PDE������Ҷ������ʼ�������������е����ѧϰ��������������ڲ���˹�����Ͻ����� 30%���ڴ������������Ͻ����� 60%������ά - ˹�п�˹���̣���ŵ��Ϊ 10000 ������״̬���Ͻ����� 30%����ͼ 1b ��ʾ������ѧϰ����ʱ�����е�ӳ��ʱ���÷�������ŵ��Ϊ 1000 ʱ���ﵽ�� < 1% ��������ŵ��Ϊ 10000 ʱ�����Ϊ 8%��
������ 256��256 �����ϣ����������ά - ˹�п�˹���̵�α������ʱ 2.2 �룬������Ҷ�����ӵ��ƶ�ʱ���Ϊ 0.005 �롣�÷����������о���ٶ����ƣ�������Ӧ�ã�������Ҷ˹�����⣩��ʹ��ʱ����ȷ��Ҳ�����½�����ͼ 3 ��ʾ��
����������
������������һ�������ṹ v_0 |�� v_1 |�� . . . |�� v_T�����У�v_j��j = 0, 1, . . . , T 1����һϵ�к�����ÿһ������ȡֵ�� R^dv������ͨ���ֲ�����㣩�任 P ������ a �� A ת��Ϊ����ά�ȵı�ʾ v_0 = P��a������һ�ֲ��任 P һ��ͨ��dz��ȫ����������в�������P ��R^da �� R^dv ������ÿ���ռ���� a��x���� R^da ִ�С����Ƶأ���� u = Q��v_T ���� v_T ͨ���ֲ��任 Q ��R^dv �� R^du ���ͶӰ��
������ÿ�ε����У����� v_t |�� v_t+1 ������Ϊ�Ǿֲ��������� K �;ֲ������Լ���� �� ����ϡ�
����
������_�� �Ǵ�������ѧ�õĺ˺��������� 1 �Ͷ��� 2 ������������������ά�ռ�ķ��� [Li et al., 2020b]����������Ƴ��Ժ��� a ����������ʹ ��_�գ�x, y��= ��_�գ�xy������õ���4���Ǿ������ӡ�
�����о����ڸ���Ҷ�ռ���ֱ�Ӳ����� ��_�գ���ʹ�ÿ��ٸ���Ҷ�任��FFT���ԣ�4�����и�Ч���㣬�Ӷ��õ��� PDE �����ϻ�� SOTA ��������Ϳ��ټܹ���
��������Ҷ������
�����о���Ա����ø���Ҷ�ռ��ж���ľ��������滻����4���еĺ˻������ӡ��� F ��ʾ�Ժ����ĸ���Ҷ�任 f ��D �� R^dv��F^1 ��ʾ��任����õ���
����
����j = 1, . . . , d_v��i = ��1 ��ʾ������λ���ʽ��4���е� ��_�գ�x, y, a��x��, a��y����= ��_�գ�x y������Ӧ�þ����������õ���
�����Ӷ��ڸ���Ҷ�ռ���ֱ�Ӳ����� ��_�գ�
����
����ʵ��
�����о�����һά����˹���̡���ά������������Ͷ�ά��ά - ˹�п�˹�����϶Ա��� FNO �Ͷ������ά�ܹ��ͻ������ӵıƽ�������
����
��������˹����
������ʵ��Ľ���μ�ͼ 2a �ͱ� 1��
�������о������ FNO ����ȡ������͵���������Ҹ����ֵ����ֱ��ʵı仯���仯�������ھ���������ķ�����FCN����������ŷֱ��ʵ����������������������ӷ��������������ռ���ʹ�� Nystrm ������ GNO �� MGNO����ȣ�����Ҷ�����ӷ�����ȷ�ʺͼ���Ч�ʷ������ʤһ�
����
������������
����
������ʵ�����μ�ͼ 2b �ͱ� 2��FNO �����������������������������һ�������������Ҹ����ֵ���������ŷֱ��ʵı仯���仯��
������ά - ˹�п�˹����
����
������� 3 ��ʾ���ھ߱��㹻����ʱ���� = 1e3, N = 1000 �� �� = 1e4, N = 10000����FNO-3D չ�ֳ����������ܡ��������ݲ����������� = 1e4, N = 1000 �� �� = 1e5, N = 1000�������������������� 15%���� FNO-2D �����ֵ��͡�
�������⣬���о��� 64 �� 64 �� 20 ������ѵ�� FNO-3D���� 256 �� 256 �� 80 �Ͻ���������ȡ���˲����ķ���Ч����������÷��������ɷ�������ͬ�Ŀռ�ֱ��ʣ���ʱ��ֱ���Ҳ�߱���������
����
������Ҷ˹������
����
��������ͼ 3 ��ʾ��FNO �ʹ�ͳ�� PDE ��������Իָ�������ͬ�ĺ����ֵ�����ǣ�FNO ֻ�� 0.005s ��������һ��ʵ�����������Ż��Ĵ�ͳ���������Ҫ 2.2s��ʹ�� FNO �� MCMC һ����ʱ���ְ룬��ʹ�ô�ͳ������� MCMC ����ʱ���� 18 ��Сʱ��
������һ�����
�������о��ĵ�һ���� Zongyi Li��Ŀǰ�Ǽ�������ѧԺ���������ѧϵ���ڶ���ʿ���������о�����Ϊ����ѧϰ�����ۼ����ѧ��Ӧ����ѧ���������һֱ������Ϊƫ�ַ����о�ͼ�����硣
����
������������������֮ǰ��Zongyi Li ��ҵ��ʥ·��˹��ʢ�ٴ�ѧ��Washington University in St. Louis�������������ѧ����ѧ����ʦΪ Brendan Juba �� Xiang Tang��