��Ȼ���е����ɼ�����֯�Ķ���Ⱥ�壬�������̼ĸ������þֲ�����ã����Բ�������ӡ����̵�ȫ����Ϊ������������Э���ı��ִ�����������ֵ��ܺ͡�
��������ͨ������������Ⱥ����Ⱥ����Ⱥ֮�С����У���Ⱥ�����ŷdz�ͻ���ı��֡�
���dz�ǧ���������飬�ں�����Ǩ�㣬��ɺ�����д���һ���ЧЭ��Ѱ����Դ��ʳ������ᶯ̬��ɸ�����̬�������ζ��ٶȣ��Բ������������ʳ�ߣ���������ǣ���һ�в�������ij����Ⱥ������ָ�ӡ�
��Ⱥ�ļ�����Ϊ��Ҫ����������Э�����������������ܻ��ڶ�����ͬ����Ӿ��۲��������ߣ�һЩ�����ڵ��ܼ��������£�����������������߸�֪���ھӡ���������Ⱥ�ɹ��ؽ����ˮ��ͨ�ŵ���ս��ʵ������Ⱥ�Ŀ���չ�Ժͽ�׳�ԡ�
���ַ�ɢ�ġ���������֯��Э����ʽ���������������ſ�ѧ���������������ڻ�����������ѧ�Һ���ʦ����ͼ�ƽ�Ӿֲ�������ȫ����Ϊ��ӳ�䣬�����û����˵ļ�����Ϊ����ǿ��
��ǰ�����Թ����ѧ�Ŀ�ѧ���Ǿʹ���Ⱥ�м�ȡ��У��з�����һ��ˮ�»����ˣ����ֻ����˿�������������Ⱥһ��ͬ���˶����Ҳ���Ҫ�κ��ⲿ���ơ�ͬʱ������Ҳ�״�����ˮ�»�����չʾ�˾�������Э���ĸ�����ά������Ϊ�������ķ����ڡ���ѧ�����ˡ���Science Robotics���ϣ�������ѡΪ 2021 �� 1 �·ݵ��¶ȷ��档
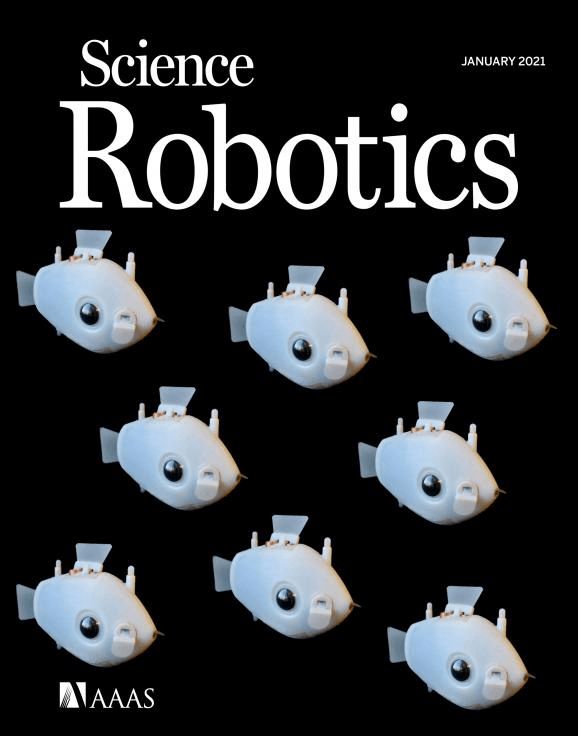
ͼ�����棨��Դ��Science Robotics��
ˮ�»������ѡ����š�
��ʵ�ϣ�ͨ��������Ա�ı�̹�������Ⱥ�ġ�����֯�Ļ������˶�����������˵����İ����
���磬�ڿ������������˻�Ⱥ�Ѿ����Ա��ݸ��ӵ�������ϰ������Ҫ��������ʽ��վ���ⲿȫ�ֵ�λ����Ϣ�������DZ��غ�����֯������ã��ڵ����ϣ��ܶ����л���ʽ������Ҳ�ܽ��в�ͬ����֯���к͵��ȣ��������ڻ�����֮�佻�� GPS λ�û�ͨ���ű����ƶ����λ�ã�����͵�Ӧ�ÿ����Dzֿ��еİ��˻����ˣ����⣬���������衢���ݽ�Ŀ�Ļ�����Ҳ����ʤ����
�������ա��ػ�������ȣ�ˮ�»�������δʵ�����Ƶ���֯ˮƽ������һ���ϰ����Ǵ�ͳ�ĵ���ͨ�ŷ������������ߵ磩��ˮ�µ����ܺܲ����λ�ö�λ���������� GPS�����������á�
��ǰ��ҵ�������о�С����ͨ������µ�ͨ�źͶ�λ���������и����ӵ�ˮ��Э�����������ù�ѧ/��ѧ���ƽ��������칹�Ļ�����Ⱥ�壬����Ҫ����ˮ�渨�������˺�����վ�ȣ�ͨ����ģʽͨ�ź�����ר�Ż���ʵ�ָ����ӵIJٿأ������ֽ��������������˹��̺Ϳ��Ƶĸ����ԡ�

ͼ��������������������һ���ζ�����Դ��Berlinger��
���������ø��ͳɱ��û�����Ⱥ����Ⱥһ���������졢�����Э���Ժ߶ȵĿɲ����ԣ����Ҷ�������縨�������أ��������֯ˮ�»�����Ⱥ���˶����о��ѵ㡣
�������˾���Ҫ���������������ӽ���Σ�յĵ���������Щ�������������������ܽ��и�Ԥ������������£�ӵ��һ���߶����Ρ��Ը�����Ļ�����Ⱥ���б�Ҫ��ͨ��ʹ����ʽ�������ά�Ӿ���֪�������ܹ�����һ����ˮ�¾��и߶������Ժ�����Ե�ϵͳ����ʹ���� GPS �� Wi-Fi ��ͨ���ź������ʵ�����¡��� �����ĵ�����֮һ�����ﰲ�����ָ�Florian Berlinger��˵����
������֯��̬��������
Ŀǰ�����ָ��ǹ����ѧԼ��������ɭ������Ӧ�ÿ�ѧѧԺ��SEAS���ͻ�˹�������������о�����һ����ʿ�������ڵ��о�С�������һ�ֽ����������ÿ��������С��װ���� LED �ƣ������ڴ˿�����һ��ˮ���Ӿ�Э��ϵͳ��
�����о��У���ֻ����С�㱻����Ϊ��Bluebot�����о���Ա����װ�� 7 ֻ��������ɵ�ϵͳ��Ϊ��Blueswarm����
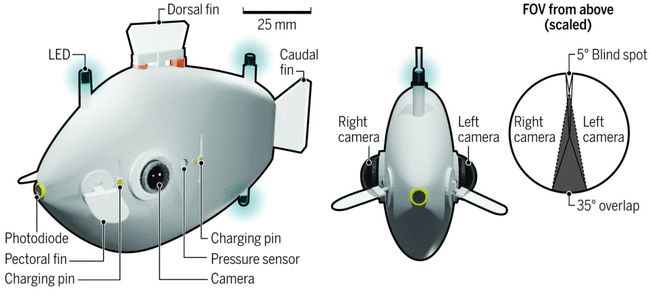
ͼ��Bluebot �Ĺؼ��������Դ��Berlinger��
Bluebot �Ĺ�����ư���������Ҫģ�飺
2 ������ͷ�ɶ���Χ�������� 3D ��֪��
3 �� LED ����Ϊ�����ű꣬�����ʶ��
4 �������ɿ���Ƭ���ṩ 3D �ռ��ζ���
�������۾�ͷ����ɼ���Զ 5m ���� Bluebot �� LED �ƹ����˸�źţ���ʹ���Զ����㷨ȷ������롢����ͺ���
��ʹ�û����Ӿ��ľֲ��������о���Ա�����˼�������֯��ˮ�»����˼�����Ϊʾ������Щ��Ϊ����Э��ͬ��ʱ�䣬�ռ��ܿط�ɢ�Ͷ�̬��ת�˶��ȣ�����Զ�����Ϊ�������ʵ���������������
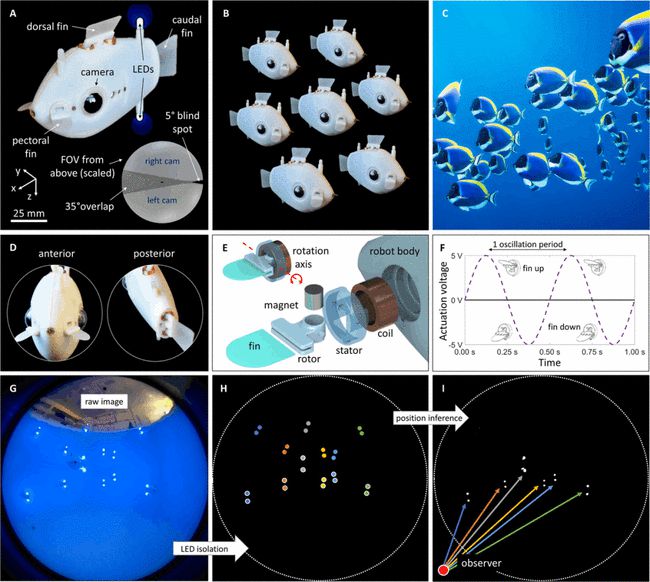
ͼ��Blueswarm ƽ̨����Դ��Science Robotics��
������Щ������ͨ��ʹ�÷dz���ͨ�ŷ�ʽ��ʵ�֣�������λ�øв����Ʒ���û���κ��ⲿ��������ɹ���֤����ά�ռ�����ʽ������֯�ͷ�ɢЭ����ˮ�»����˼��ϵĸ��
������ԣ����������� 3 ���ؼ��Ļ�����Ҫʵ�֣�
1����ʱ�������֯������ө���ͨ����˸����������һ����7 �� Bluebots �����˵� LED ͬʱ��˸���֮���۲�����ͬ�����˸��������ھ������ֲ�ͬ����˸�������Ե���˸������ʵ��ͬ����
������Զ�����ˡ��ֲ�ʽ����ġ�ө���ͬ���㷨��Ҳ��һ��רҵ���ʣ����� Mirollo-Strogatz ģ�͡�
2����ռ������֯���п�ѧ�о���Ϊ��һ��������Ⱥ�У�����Ŀ����ܵ������ھӵ�������Ӱ�죬����̫�����ھӻ��ų⣬����̫Զ���ھӻ�������������������ȷ����ʽ��δ֪��
���о���ԱҲ�ǽ�������ԭ����Bluebot ���Ӿ���ȷ���ھӵ����λ�ã�����û���κ�ֱ�ӽ������������������ķ�Ӧ�����ܲ������ַ�����������ģ�͵Ľ������һ���ģ�������Ⱥ�����ڷ�ɢ��һ�������ų�������������ƽ����������ǵ��ܶȺ���ɢ�̶ȡ�
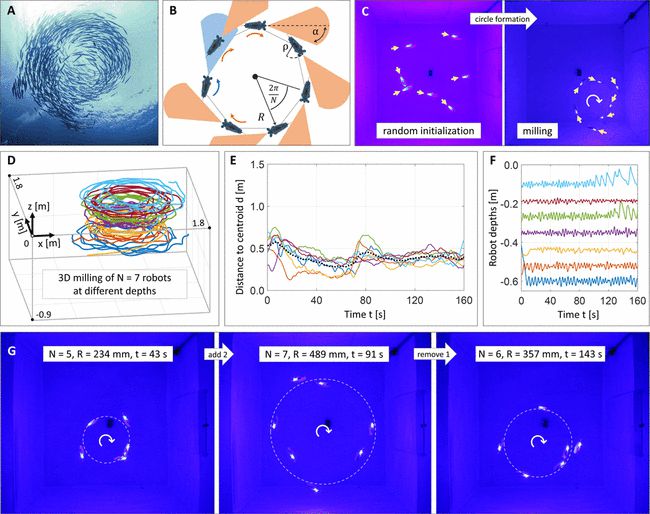
ͼ������֯�Ķ�̬Բ���γɣ���Դ��Science Robotics��
3����̬��ת�˶�����Ⱥ����ŵļ��ܣ����Ǻ�����׳�۵ġ���Ⱥ�籩���ˣ����Ǿ����������ַ�ʽ����ܲ�ʳ�ߵ�ɱ����ò�ʳ����ͷת��
�������о��У��о���Ա���������ơ�ϳ�����ṹ����Ϊ���ù��������ڶ�ÿ���ɼ��ھӵĵ�����Ӧ�����������ڵ�����������ϢԴ������ϢԴָʾ����һ�������������Ƿ��������ڡ�
����������£���������һ���趨������������κ������κ��ھӣ�����������ת����������κλ����ˣ���������ת����Ȧ�������������Է��ۼ�������˶�̬Բ�˶���Ϊ��
����о���Ա�ڷ�ɢ��������ʾ�У�����˶�����Ϊ��ʵ�ּ�������������
�����ࡢ�������������༯���У�ɨ�軷���Ĺ�����������ɸ���֮�乲�����Ӷ����Լ���ÿ������ĸ�����ͬʱʵ�ָ��ߵļ��徯���ԡ�
δ��������ˮ������
Blueswarm ������о��������ڹ����ѧ���Ͽ����ɸ�����Radhika Nagpal��ʵ���ҽ��еġ��ɸ���Ŀǰ���ι����ѧ SEAS��Fred Kavli �������ѧ���ڣ��Լ���˹�������������о��������ڣ����쵼������֯ϵͳ�о�С�飬̽�������������Ļ����˼�������������ϵͳ�Ŀ��й�����
���� 2014 �꣬����ʵ���Ҿ�����������һ���� 1024 ���ͻ�������ɵ����� Kilobots����ʱ Kilobots �������������ڰ�����Ⱥ����Щ����ǧ�Ƶķֲ�ʽ�����ˣ����ú��ⷢ�����ͽ�����������������һЩ�ھӽ���ͨѶ���������ǵĽӽ��ԣ��������ָ����̬��������ϡ�
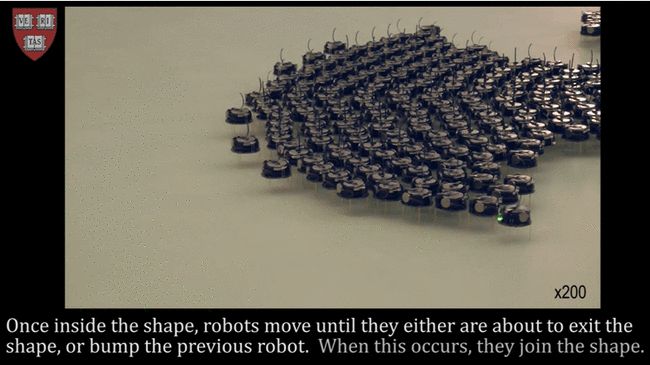
ͼ�� Kilobots �����ˣ���Դ�������ѧ��
���ڴ˴λ�������о��ɹ����ɸ�����ʾ����Blueswarm ������ˮ�»����� 3D ����֯������Ϊ�о�����Ҫ��̱�������ʵ�����سɹ�������������δ��������ˮ��Ⱥ������ˣ����ǿ�����ˮ�½��л����������������о���ͨ���ۺ��������ǵ���Ϊ��Ϊ���õ��˽���Ⱥ��ƽ�˵�·����
��������������������ʾ����Ϊ�У�Bluebots �����������Ӿ���Ϣ����Щ��Ϣʵʱ��ȡ�ʹ�������ЩЭ�������Բ����Ƶ�֪ʶ����³���ԣ������ܹ��ӿ��ƼĽ����У���������Ӷ���̬��ȫ����Ϊ��
��Ȼ���������ܽ���Ҳ�ᵽ��һЩ�����ԣ�����ʹ�õͳɱ�����ʽִ�������˶�Ч���������������⣬����ڻ��ǵ�ˮ����Ӿ��ϲ�Ļ����£�������Ҫ����������������ȡ�
��������ˮ�»����˳ɹ���չ�����о���Ա��ʾ��Ҳ��������ʵ�ֻ����˵��ල���ܽ������Ӷ��п��ܽ�϶��ֻ�����ģʽ�����С����桢ˮ���ˮ�£�����ʵ�ֿ���չ��ǿ���ð�ջ��
δ������Щ�����˿��Լ��������ȥ����ʧ�·ɻ��IJк������Ѵ�ֻ����ˮ��Ա���Լ�Ӧ�õ����绷����⡢��ɺ�������غ�ˮ�����������ȡ�