һת�ۣ����Գ˻𱬣���Ϥ����10��12�յ��죬Apollo GO�Զ���ʻ���Լ���������ۼƴﵽ��2608����
��Ϊ����������������˹����ܳ���֮һ���Զ���ʻ����һֱ���ܹ�ע���ӹȸ�Waymo�����ڵİٶȺ͵εΣ����ڼӽ��з��ƽ���
��������û��������ܷ���Զ���ʻ����Ӧ���ڴ����أ�
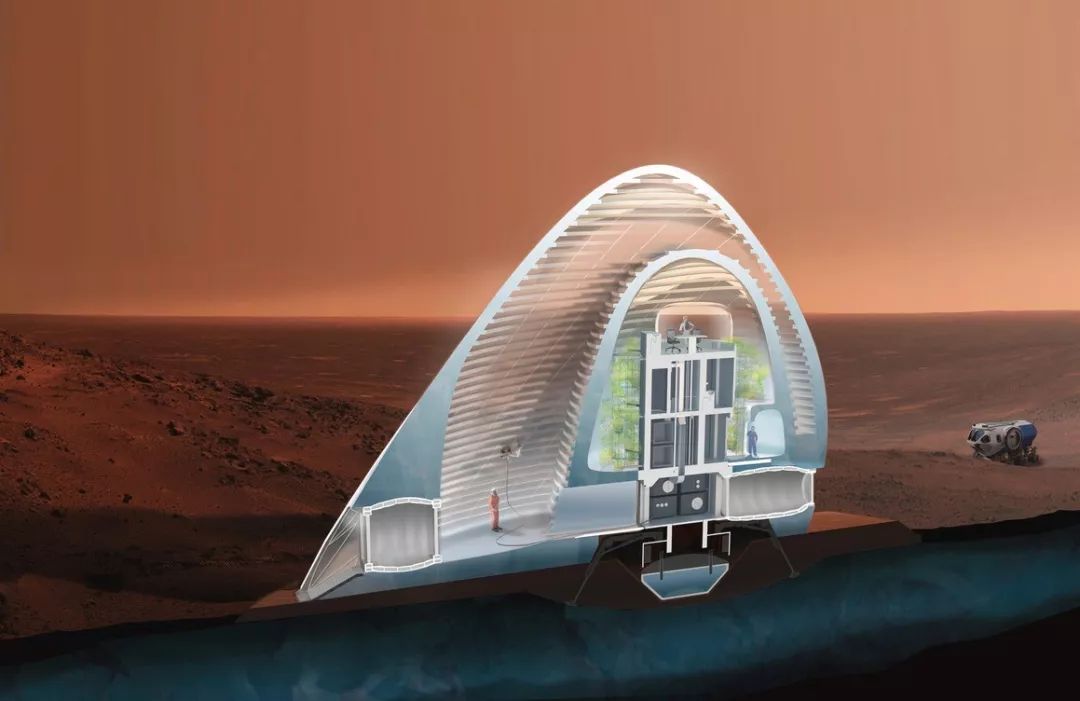
�����У����գ���ʡ����ѧԺ�������ѧ���˹�����ʵ���ң�CSAIL�����о���Ա�ƣ������Ѿ�������һ�ֿ��������ƶ����Զ���ʻ�������ܹ��ڴ��س˿��ӣ���ʹ�����ļ���ˮ����Ҳ�ܱ����ȶ�ǰ�У��о���Ա���������˸���Ȥ�����֡���Roboat II��

Roboat��һ��Ϊ��5����о���Ŀ���о���Ա�ij�����ϣ��ͨ����Щ������ʻ�������찢ķ˹�ص����˺ӣ���������������ռ�ˮ�����������ͻ������Ա��
����ͼ������������Щ�����ᡱ����ֻ�Ǹ�����~ δ������Χ�ᰲ��Χ����һ������ܳ���6���أ�

Ŀǰ����ƪ�о��Ѿ��ڹ���������������ϵͳ������չʾ��ֵ��һ����ǣ���ƪRoboat II �������ĵ�һ����ΰ�����Ա����һ����ʿ��ҵ����
�ܼ����������ˣ����ܡ������������ߡ�����ֻ��������ת������
Roboat II ����CSAIL����ʡ����ѧԺ��֪����ʵ���ҺͰ�ķ˹�ص��Ƚ����н�������о�����AMS���ڹ�ȥ�����п�����������ʻ�������³�Ա��
����ǰ������Ŀ�ոտ�ʼ��ʱ��ʹ�õĻ���һ�׳��Ĵ�ֻ��ֻ������Ӿ�غ��˺��С����������������Ĵ�ֻ��չ��
Roboat II ��2�ף�6Ӣ�ߣ�����50���110�������ɴ���4-6���˿�����MIT��Ϊ��Covid-friendly������Ϊ������ʹ�˿�֮�䱣�ָ�����롣�����Բ���0.17�ף�7Ӣ�磩�����ڰ�ķ˹�ص��˺��Ϻ���3��Сʱ��

�����εĴ�������Ŵ��������ƽ������������������������Ӳ����
�о���Ա��Ŀ���Ǵ�������ڰ�ķ˹�ص�160�����˺��������˺ͻ���Ļ������ӣ����ǻ�ϣ����Щ��ֻ�ܹ��������任���Ρ������紬ֻ���ԡ���������������һ��������������ӵ�¡�
����Ҳ�Դ˽�����ʵ�飬ʵ���趨�����Ǵ�ֻ�����������ǡ���������һ�𣬶����м�Ĵ������쵼�������еķ���켣��

�о���Աչʾ��10�����µ�ʵ����̣������������ͼ��ʾ���ǽṹ�Ĺ켣�ͷ���������ɫ����ɫ�켣����ʵ���飻�Ҳ���������ͼ��ʾ���ǻ�����ֻ���������أ����к�ɫ�켣������Ӵ�ֻ��


�����ʾ������С���ܹ���������������ɲ�ͬ�켣�ͷ������ʻ������Follower��������С�����������л����Ĺ��ף������Follower�������м��Leader��ֻ��ʻ��任����
����֮������ͨ�ţ������߿�Ԥ�������ͼ�������Լ��ƶ��켣
����һ�������������ȣ�Roboat II �Ľ���ͬ����λ��ӳ���㷨��SLAM�����Լ�����ģ�͵����ſ�������������ģ��Ԥ����������ͻ����Ż���״̬���������ƶ���ƽ�߹��ƣ���
ͨ������SLAM�㷨�����ü����״��GPS���������Լ����ڶ�λ����̬���ٶȵĹ��Բ�����Ԫ����ֻ���Խ������Ҷ�λ���������������Թ滮���IJο��켣���滮��������·���Աܿ������ϰ���

ͨ��ÿ��Roboat�����еķֲ�ʽ��������Ҫ���ӽṹ���ٶ���Ϣ���Խṹ���ĵ��ٶȱ�ʾ������Roboat II ֪���Լ�����ڽṹ���ĵ�λ�á�Ҳ����˵��Roboat II ���㷨����Ҫ���λ�ã�ÿ��Roboat II ʹ���Լ����ٶȣ������ǽṹ���ĵ��ٶȡ�
����� Roboat II ��ʼ�������Ŀ�ĵ��ƶ�ʱ����һ��Roboat II ���Թ�����ӵ���ͼ�������Լ����ƶ��켣����Ӵ�������ͨ����������������Roboat II �����ಿ�֣�������Ҫ���Ҵ�֮������κ�ͨ�š�
�о���Ա�ƻ���δ��ʹ���˹�����������Roboat�Ĺؼ����������ǻ�����̽������Ӧ�������������屻�����ڴ���ʱ�������ṹ�Ķ�̬�仯��