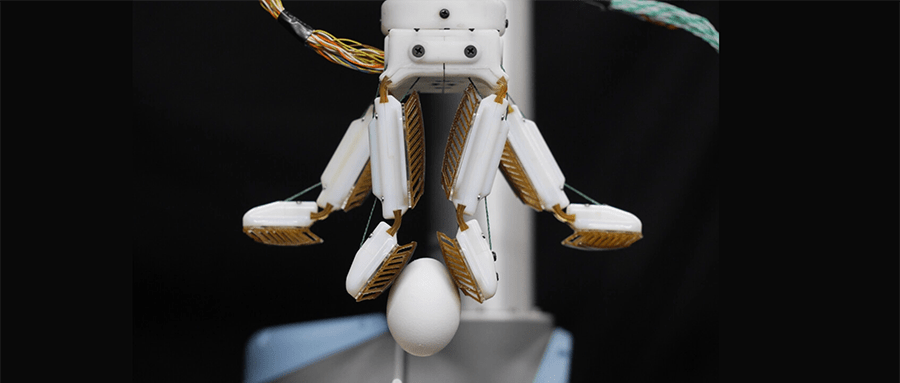
��������˹̹����ѧ����ʦ��һ���³ɹ������ڹ���ѧ����������ѧ�����ӿ�����ѧ��������ѧ���ϡ��о���Ա�ܱڻ���ֺץ��������������һ�ּ�����ɺ��Ƚ�ץ�������Ļ�е�֡�FarmHand����������ƽ��ץ�ռ��������ѡ���������塣
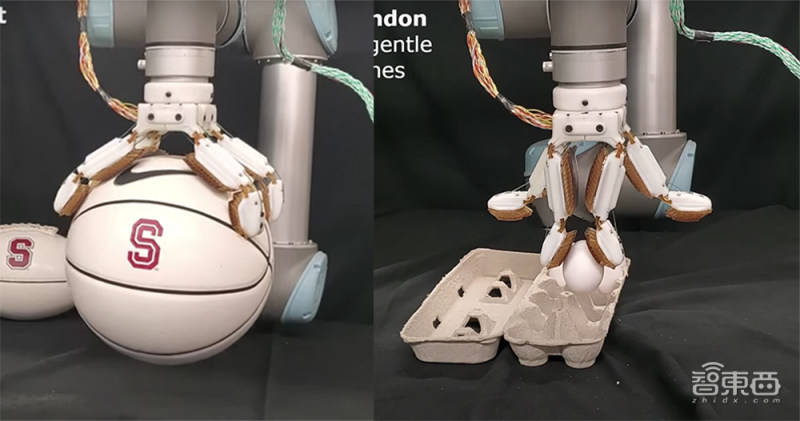
��ܶ����dz����Ļ�е�ֲ�ͬ����һ��е�ֵĶ�ָ�ؽ�������һ�������Ը���Χ��չ�����պϣ�����ͼ��ʾ������һ�����ơ���ժ���ķ�ʽץȡ�����������������Լ������������塣
˹̹����ѧ����ѧ�����ɲ���ʵ���ҵ�ǰ�о�����21�������ѷ�������壨Wilson Ruotolo��˵������ῴ����е�ֽ���ǿ��ץ�պ;�ȷץ�գ�Ȼ��ʾ���ǿ������κ����顣������Ҫ���������δ����������ǿ��Ļ�е�֡���
˹̹����ѧ����ѧ�����ɲ���ʵ���ҵ��о���������ʹ��������Ͷ���Dane Brouwer�����ڻ�е�ֵ�������12��15�շ����ڡ���ѧ��������ѧ����־�С�

���ӣ�
https://www.science.org/doi/10.1126/scirobotics.abi9773
һ������Ϊ��ũ����ˮ�����������ڻ���
�о���Ա�����ڱڻ���ֺץ��ԭ�������ճ�ϼ��붨�ƵĻ�е�����ϣ�ּ�ڴ���һ���ܹ����������ץ�յĻ�е�֣�����ʵ�ֺ��������ƵĴ�Χչ�����պϡ�
�о���Ա��Ƴ�������Ϊ������ũҵ�������ߣ����û�е������ز���ˮ������Ϊһ���ܸ�Чʹ�ø�ʽճ�ϼ�����ͨ�û�е�֣������˴�ֽ����ժ�����ʹ���������ժ���ѵ��������ɡ�
��ץȡ����
�����ѡ����ơ��ſ��ô��ģ����ݽϴ��͵����壬�������������ϵȡ�

��ץȡ����
����е�ֻ�������ǿ���ٿر���������������
���ٿؽϴ�����
���⣬��һ��е�ֻ�����ͬʱץȡ�������塣
��ͬʱץȡ��������
���ڻ�ճ�ϼ����״�Ӧ�������������ˡ������˻�ץȡ�ռ��зdz��dz��⻬�������йء���������һֱ�ڿ��ǽ��������ڸ�ʵ�ʵ�Ӧ�ó���Cutkosky˵��������ʵ֤�����ڻ�ճ�ϼ�ʵ���Ϸdz����ޡ���
�״��ڶ�ָ���˻�е����ʹ�ñڻ�ճ�ϼ���һ����ս������Ҫ�ر�ע����ƻ�е����ָ�ļ����ճ�ϼ��·���ָ����ơ�
�������÷��Ӽ���������ʵ���ȹ�ץ��
ƽ�л�е������ڸ����˻��Ķ�ָ��е�ֵ�һ�������Ǿ��и�ץ����DZ������˿���ʹ�õ�����ȷ��ָ���������������ָ��е��farmHand���ñڻ�ճ�ϼ��ṩ�˸����ץ��������
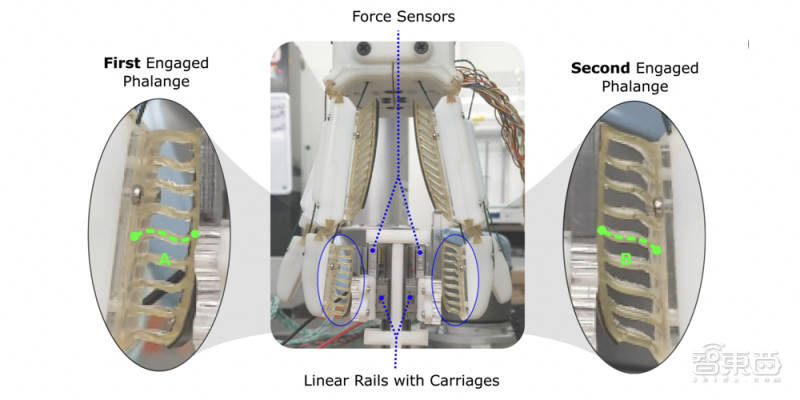
�û�е������������������С����������֣����ж�ؽڵ���ָ�����������ĸ���ָ������DZڻ������ڱڻ���ֺץ�ص���У��ڸ����ĵ�����֮һ��˹̹����ѧ����ѧԺ��������˹�������ˡ����ؿ�˹����Mark Cutkosky���쵼�£��о�С��������ץ����ǿ����ճ�ıڻ�ճ�ϼ���Ϳ����һ��е�ֵ���ָ�ϡ�
����е��ԭ��ͼ
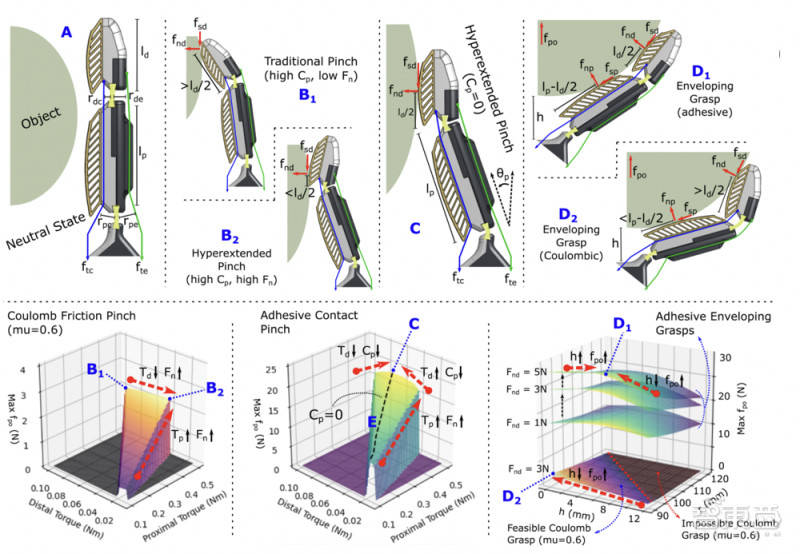
����ڻ��Ľ�ֺһ����ͿĨ�ڻ�ճ�ϼ��Ļ�е�ֿ���ͨ��С��Ƥ��̶��������ϡ����������ȫ�Ӵ�ʱ����ЩƤ���������»��������Ӽ�������������ɷ����ⲿ����λ�õ�ϸ����������ˣ�ճ�ϼ�����Ҫ��С�������Ϳ����ι�ץ�����塣����ճ�ϼ�����һ���ô����ǣ��������������ᷢճ�����²����
��е��ͿĨ�ڻ�ճ�ϼ���ץȡ������Ҫ������ָ����������Ǽ�ˣ����������ṩ������õĽӴ�����Ϊ��̽��Ȩ�⣬�о���Աͨ�������������ӳ��ȹ̶���Լ�����������е���ƶ�����Ť�ء�
���������߹ǽṹ������ץ�����
����Ĺؼ����ڣ��ڻ�ճ�ϼ��������ض���ʽ���������Ӵ����Լ���»����������ڻ�ճ�ϼ�ͿĨ�ڽ�Ϊƽ̹�ı�����ʱ�����ԱȽ����ؿ���������Ӵ��ķ�ʽ�����ǵ����������ڶ�����бڻ�ճ�ϼ�����ָץ�����壬���Բ�ͬ�ǶȽӴ�����ʱ��Ҳ����ʹ��farmHandץ��ʱ�����ڱڻ�ճ�ϼ��Ŀ��ƾ������ѡ�
Ϊ�˽����һ���⣬�о���Ա��ճ�ϼ��·���Ϊ�û�е��������һ��ָ�档���ֽ���ɿ��۵������߹�һ���Ľṹ�Ƴɣ�ֻ���С�����������������۽Ӵ���λ�û�Ƕ���Σ�������������״̬����ȷ��ճ�ϵ��ϵ�����ȣ�����ֹ�����κ�һ�����绬������������䡣
����е�ֵ�ָ�����
��������ƶ���Щ�߹ǣ�����������↑ʼ����������������Ƶ���������������˵��������һ�ּ�������Ϊ���������Բ����ڻ����˼���֮��Ŀռ��У�����Ь���ȫ������̥����
���ֵļ������Ҫ������ʵ�ִ�Χ��չ�����պϡ������ܶ��е�ֺͼ��ӱ���Ƴɡ�C���Σ�����ֻ��ָ�������һ��������һ��е�ֻ������ֵļ���ԭ����ʵ���˸����ץ�����������ָĩ�˰�װ�˵��ӣ���ҲΪ�ڻ�ճ�ϼ��ṩ�˸���ı������
�������ֹ���ǿ��Ļ�е�ֵĵ���һ���������ڣ����еļ����ģ�����Ԥ�����������ʵ���ܣ����ʹ���ǡ���ô��������ѡ������о���Ա��3D��ӡ�Ͳ�������Ӳ���Ϻ���������������������dz����Ҳ�ӿ������ǵ��о����̡���������˵�������������ǰ�������о���̫���ܳɹ�ʵ�֣���������Ҫ���öࡣ��
�Ըû�е�ֵĽ�һ���Ľ����ܻ��Է������ܵ���ʽ���֣��⽫�����û��˽�����ץ�շ�ʽ�Լ���ʹ�û�е��ʱ��θ��õ�ץ�ա�
������������Ƚ����ٽ���ҵ�����
��ָ��е�������ƽ�л�е�ָ���������Ҫ��ʵ�������в��ã�����Ҫ�߱�ƽ�л�е�ֵ��Ƚ����ܡ���˹̹�����о���Ա����е�ֵ�����Ժն����ϣ��ȿ���ץȡ���������ϵȣ�Ҳ����ץ�ձ��Լ�������塣
��Σ�������е��farmHandԭ���ǵͳɱ��ģ���ҲΪ�������ṩ���������о���Ա��ʾ����δ���������ܵĵ��Ť�ؽ�ʵ�ָ��ߵļ����������Լ����ø�Ӳ���߹�Ҳ�����е�ֵ������ȶ��ԡ��о���Ա���ڿ��ǽ���һ��е�ֽ�һ����ҵ����
��Դ��˹̹����ѧ����������ѧ��������ѧ��