ץȡ��ͬ��С����״�������������������˵�����ף����Ի�������˵ȴ������ս�ԡ�Ӣ�����Ŵ�ѧ�Ŷ������һ�ֵͳɱ�������Ч������3D��ӡ�������֣���ƾ�����˶��͡�Ƥ�����о�������������ץסһϵ�����壬���Ҳ��������ǵ��䡣�о��������������ġ��Ƚ�����ϵͳ����־�ϡ�
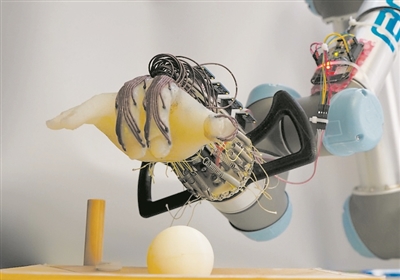
�û�е�־���ѵ����ץȡ��ͬ���壬�������÷������䡰Ƥ�����ϵĴ������ṩ����Ϣ��Ԥ����Щ�����Ƿ����䡣���ֱ����˶�ʹ�����˱�ȫ�綯��ָ�����˸������ƣ�Ҳ�����ܡ�
�о���Ա��ʾ�����ǵ���Ӧ����ƿ����ڿ����ͳɱ������ˣ���Щ�������ܹ����и���Ȼ���˶������ҿ�ѧϰץȡ�������塣
���ַdz����ӣ��ڻ����������������е�����Ժ���Ӧ����һ�����о���ս��
���Ŵ�ѧ����ϵ����������ʵ�����о���Ա��ͼ������������������DZ�ڷ������������ֿ������ٵ�������ǡ��������ץȡ�������塣
�о���Աʹ��ֲ���˴�����������3D��ӡ���˻��֣������־��ܸо��������ڴ���ʲô����ֻ��ֻ�ܽ��б����ġ�����������˶����ŶӶԻ������ֽ�����1200��β��ԣ��۲���ץסС�������������������û��������ʹ��С��3D��ӡ���������ѵ������ʹ��ͨ��������ʾ��õ�Ԥ���嶯����ץס���ǡ�
������ͨ�������������˽�ʲô����ץ�ջ�ɹ������������ѵ�������᳢��ץȡ��ͬ�����壬�������ӡ���������һ����ĭ��װֽ������Щ�����У���е�ֳɹ�ץס14�������е�11����
��������ϵͳ��ͨ�����ַ�ʽ������չ������ͨ�����Ӽ�����Ӿ����ܣ����߽̻����������价�����⽫ʹ���ܹ�ץȡ���㷺�����塣