здШЛНчжаЕФЩњЮяЪгОѕЯЕЭГвђЦфЖрбљЛЏЕФЙІФмв§ШЫзЂФПЃЌгШЦфЪЧОпгаЗЧЗВЪгОѕФмСІЕФИДблЯЕЭГЃЌШчПэРЋЕФЪгГЁНЧКЭЧПДѓЕФдЫЖЏИњзйФмСІЃЌдкЛњЦїЪгОѕЕФЪЕМЪгІгУжаОпгаОоДѓЕФЧБСІЁЃЕБЧАжЦдьИДблЯЕЭГЭЈГЃВЩгУПЩБфаЮЕчзгММЪѕЃЌШЛЖјИУММЪѕУцСйАќРЈШЋОжаЮБфЕФИДдгадЁЂгІСІЮШЖЈадЁЂМИКЮЯожЦЁЂвдМАЙтбЇзщМўгыЬНВтЦїЕЅдЊжЎМфВЛЦЅХфЕФЧБдкЮЪЬтЃЌвђДЫПЊЗЂвЛЬхЛЏЕФШЫЙЄИДблЯЕЭГВЂНЋЦфМЏГЩЕНзджїЦНЬЈШчЛњЦїШЫЛђЮоШЫЛњЩЯЪЕЯжЬиЖЈЕФЪгОѕЙІФмМЋОпЬєеНадЁЃ
НќЦкЃЌЯуИлПЦММДѓбЇЗЖжЧгТНЬЪкЭХЖгПЊЗЂСЫвЛжжЖРЬиЕФеыПзИДблЃЈPHCEЃЉЯЕЭГЃЌИУЯЕЭГМЏГЩСЫ3DДђгЁЕФЗфЮбзДЙтбЇНсЙЙКЭАыЧђаЮЕФШЋЙЬЬЌИпУмЖШИЦюбПѓФЩУзЯпЃЈPNAЃЉЙтЕчЬНВтЦїеѓСаЁЃетжжЮоЭИОЕЕФеыПзНсЙЙЃЈPHAЃЉПЩвдИљОнЕзВуЭМЯёДЋИаЦїЕФашЧѓЃЌЩшМЦжЦБИГіШЮвтВМОжЁЃИУЭХЖгЭЈЙ§ЖдБШЙтбЇФЃФтКЭГЩЯёНсЙћбщжЄСЫИУЪгОѕЯЕЭГЕФЙиМќЬиадКЭЙІФмЃЌАќРЈГЌПэЪгГЁЁЂОЋзМЕФФПБъЖЈЮЛКЭдЫЖЏИњзйФмСІЁЃИУЭХЖгНјвЛВНбнЪОСЫPHCEЯЕЭГдкЮоШЫЛњЩЯЕФЙІФмМЏГЩЃЌЪЙЦфФмЙЛИњзйЕиУцЩЯЕФЫФзуЛњЦїШЫЁЃетжжЖРЬиЕФПежа-ЕиУцазїЛњЦїШЫЛЅЖЏеЙЪОСЫPHCEЯЕЭГдкЮДРДЖрЛњЦїШЫазїКЭЛњЦїШЫШКММЪѕПЊЗЂжаЕФЧБдкгІгУЧАОАЁЃ
ЯрЙиЙЄзївдЁАAn ultrawide field-of-view pinhole compound eye using hemispherical nanowire array for robot visionЁБЮЊЬтЗЂБэгкЙњМЪЖЅМЖбЇЪѕЦкПЏЁЖScience RoboticsЁЗЃЌВЂЕБбЁЕБдТЗтУцЮФеТЁЃЯуИлПЦММДѓбЇЕчзггыМЦЫуЛњЙЄГЬЯЕВЉЪПКѓжмгюЁЂЫяВЉКЭВЉЪПбаОПЩњЖЁгюkЮЊЮФеТЙВЭЌЕквЛзїепЃЌЯуИлПЦММДѓбЇЕчзггыМЦЫуЛњЙЄГЬЯЕНВЯЏНЬЪкЗЖжЧгТЮЊЮФеТЭЈбЖзїепЁЃИУЙЄзїЕУЕНСЫЯуИлбаОПзЪжњОжЯюФПЁЂдСИлАФСЊКЯЪЕбщЪвЯюФПЁЂПЦбЇЬНЫїНБвдМАжавјЯуИлПЦММДДаТНБЕФДѓСІжЇГжЁЃ
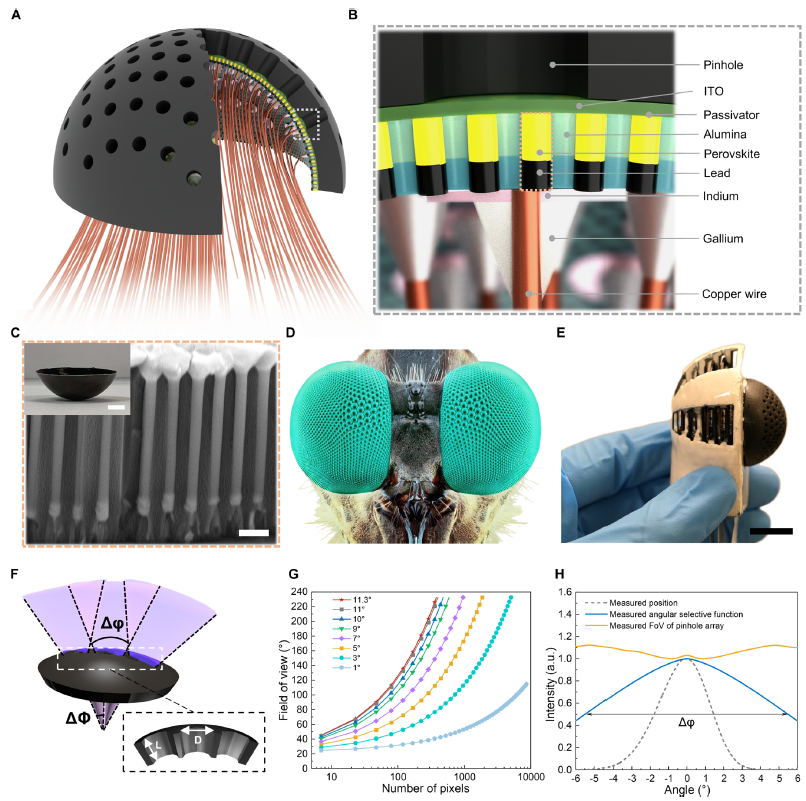
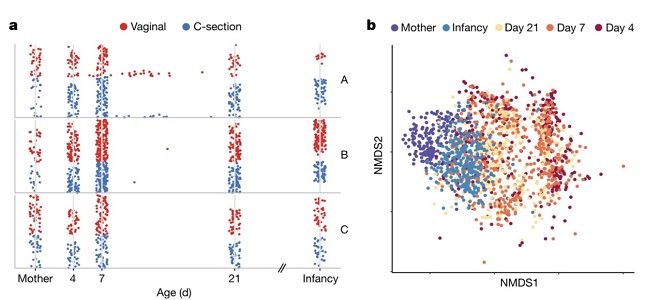
ЭМ1. PHCEМАЦфМЏГЩзщМўЕФЪОвтЭМКЭЭМЯёЁЃЃЈAЃЉPHCEећЬхНсЙЙЪОвтЭМЁЃЃЈBЃЉPHCEЯЕЭГЕФЦЪЪгЭМЁЃЃЈCЃЉАыЧђаЮЖрПзбѕЛЏТСФЄжаИЦюбПѓФЩУзЯпЕФКсНиУцЕчОЕЭМЯёКЭКъЙлееЦЌЁЃЃЈDЃЉЧПЕСгЌблЕФКъЙлееЦЌЁЃЃЈEЃЉАВзАдкгЁЫЂЕчТЗАхЩЯЕФPHCEЯЕЭГЕФВрЪгееЦЌЁЃЃЈFЃЉЯрСкеыПзЕЅдЊЕФКсНиУцЪОвтЭМЁЃЃЈGЃЉВЛЭЌаЁблМфНЧЯТеыПзЯёЫиЪ§СПгыећЬхЪгГЁНЧЕФЯрЖдЙиЯЕЁЃЃЈHЃЉЕЅИіеыПзКЭеыПзеѓСаНЧЖШвРРЕЕФЙщвЛЛЏЧПЖШЗжВМЁЃ
вЊЕуЃКбаОПепЪмЕНРЅГцЃЈР§ШчЧПЕСгЌЃЉИДблЖРЬиМИКЮНсЙЙЕФЦєЗЂЃЌЩшМЦСЫЗфЮбзДЕФеыПзеѓСаЃЌЭЈЙ§ЙтбЇМЦЫуКЭФЃФтЗТецгХЛЏСЫгаЯоЯёЫиЪ§ЯТЕФНгЪмНЧІЄІеЁЂаЁблМфНЧІЄІЕЃЌШЗЖЈСЫЖдгІеыПзЕФзюМбГЄЖШжБОЖБШЃЌПЩвдЯћГ§ЯрСкаЁблжЎМфЕФУЄЧјВЂМѕЩйЙтаЇТЪЫ№ЪЇЁЃбаОПепЪЙгУФІЗНОЋУмУцЭЖгАЮЂСЂЬхЃЈPІЬSLЃЉЙтПЬ3DДђгЁММЪѕЃЈnanoArch® P140ЃЌОЋЖШЃК10 ІЬmЃЉжЦБИСЫЖдгІМИКЮВЮЪ§ЕФеыПзеѓСаЃЌВЂгыАыЧђПЧЕФЭЙУцЙВаЮЃЌдСЯЮЊЙтУєЪїжЌЁЃгЩгкИпДђгЁздгЩЖШКЭМђЛЏЕФНсЙЙЃЌЩЯЪіеыПзеѓСаЕФВЮЪ§ПЩвдКмКУЕиЩшМЦКЭаЕїЃЌвдТњзуЖдгІЭМЯёДЋИаЦїЕФашЧѓЁЃ
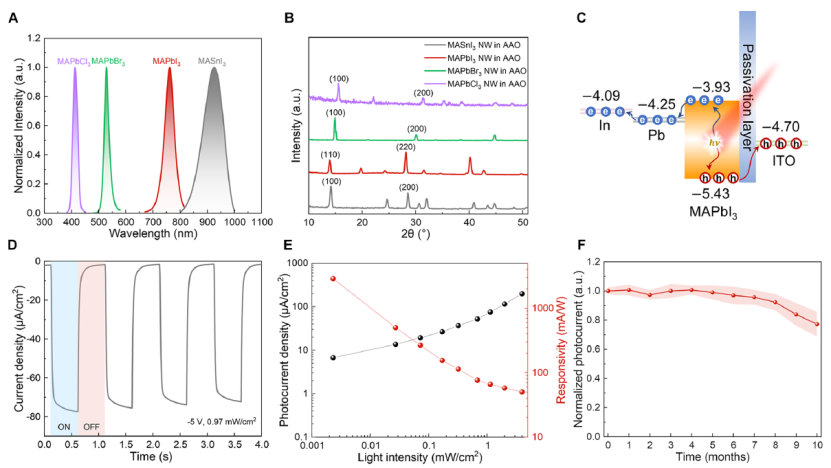
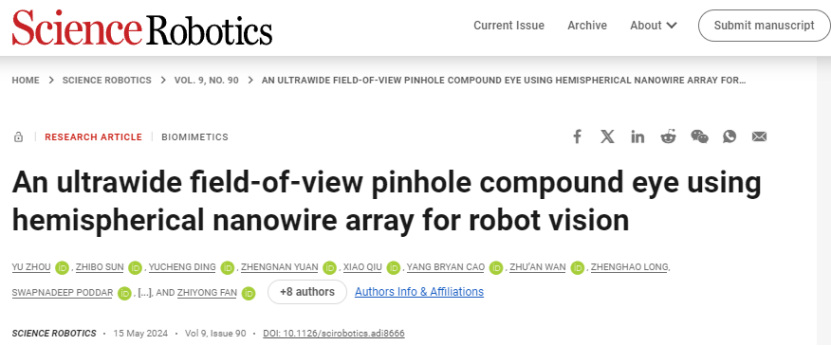
ЭМ2. ИЦюбПѓФЩУзЯпЙтЕчЬНВтЦїЕФадФмЁЃЃЈAЃЉЖрПзбѕЛЏТСФЄжаВЛЭЌИЦюбПѓФЩУзЯпЕФЙтжТЗЂЙтЙтЦзЁЃЃЈBЃЉВЛЭЌзщЗжИЦюбПѓФЩУзЯпЕФXЩфЯпбмЩфЙтЦзЁЃЃЈCЃЉЕЅЯёЫиФЩУзЯпЙтЕчЬНВтЦїИїВПЗжФмМЖЙиЯЕЁЃЃЈDЃЉЕЅЯёЫиЬНВтЦїЕФЪБМфвРРЕПЊ/ЙиЙтЯьгІЁЃЃЈEЃЉЕЅЯёЫиЙтЕчЬНВтЦїЕФЙтЧПвРРЕЙтЕчСїУмЖШКЭЯьгІЖШЁЃЃЈFЃЉЮДЗтзАЕЅЯёЫиЙтЕчЬНВтЦїЕФЙЄзїЮШЖЈадЁЃ
вЊЕуЃКИЦюбПѓФЩУзЯпЪЧдкбѕЛЏТСФЩУзЭЈЕРФквдЧІФЩУзЯпзїЮЊЧАЧ§ЬхжЎвЛЩњГЄЕФЃЌЮДЭъШЋЯћКФЕФЧІгыИЦюбПѓаЮГЩНгДЅЃЌдкГ§ШЅЛљЕзКѓЃЌЭЈЙ§ШШеєЖЦЕФЗНЪНжЦБИАМЧђУцЕФюїЕчМЋЃЌбаОПепЪЙгУPІЬSL 3DДђгЁММЪѕжЦБИСЫгыАыЧђПЧАМУцЙВаЮЕФбкФЄАцЁЃбѕЛЏТСЖрПзНсЙЙЮЊИЦюбПѓВФСЯЬсЙЉСЫЬьШЛЕФЗтзАЃЌЬсИпСЫЦїМўЕФЙЄзїадФмЁЃЭЈЙ§ЕїНкИЦюбПѓжаЕФТБЫиКЭН№ЪєдЊЫиЃЌPNAЙтЕчЬНВтЦїИаВтЧјгђПЩвдДгПЩМћЭиеЙЕННќКьЭтЁЃдкШѕЙтЯТЃЌЬНВтЦїЕФЯьгІЖШПЩДяЕН2.9 A/WЃЌЫцзХЙтееЧПЖШЕФдіМгЃЌЙтЕчСїдіМгЖјЯьгІЖШМѕаЁЁЃДЫЭтЃЌЮДЗтзАЕФЦїМўдкГЃЙцЛЗОГжаДцЗХ 10 ИідТКѓЃЌШдБЃГжГЌЙ§80%ЕФдЪМЙтЕчСїЪ§жЕЁЃ
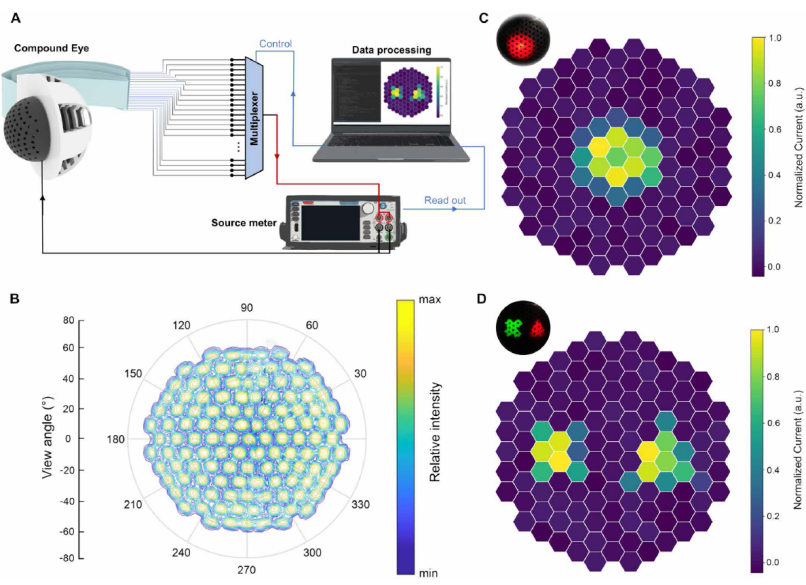
ЭМ3. PHCEЯЕЭГЕФГЩЯёФмСІЁЃЃЈAЃЉВтСПзАжУЕФЪОвтЭМЁЃЃЈBЃЉАыЧђаЮГЩЯёЯЕЭГЕФЪгГЁВтСПЁЃЃЈCЃЉВЖЛёЕФдВаЮЭМАИЭМЯёЁЃЃЈDЃЉВЖЛёЕФЪЎзжКЭШ§НЧЭМАИЭМЯёЁЃ
вЊЕуЃКбаОПепМЏГЩСЫгЩ121ИіаЁблЙЙГЩЕФЕЅФПИДблЯЕЭГЃЌАыЧђаЮЕФМИКЮНсЙЙИГгшећИіЯЕЭГдМ140ЁуЕФДѓЪгГЁНЧЁЃPHCEЯЕЭГФмЙЛдкЙуРЋЕФЪгГЁФкГЩЯёЁЃгЩОлЙтЕЦЩњГЩЕФдВаЮЁЂЪЎзжКЭШ§НЧЭМАИПЩвдБЛPHCEЯЕЭГзМШЗВЖЛёВЂГЩЙІЪЖБ№ЁЃЩЯЪіЪЕбщГЩЯёаЇЙћгыФЃФтЗТецНсЙћИпЖШЮЧКЯЁЃ
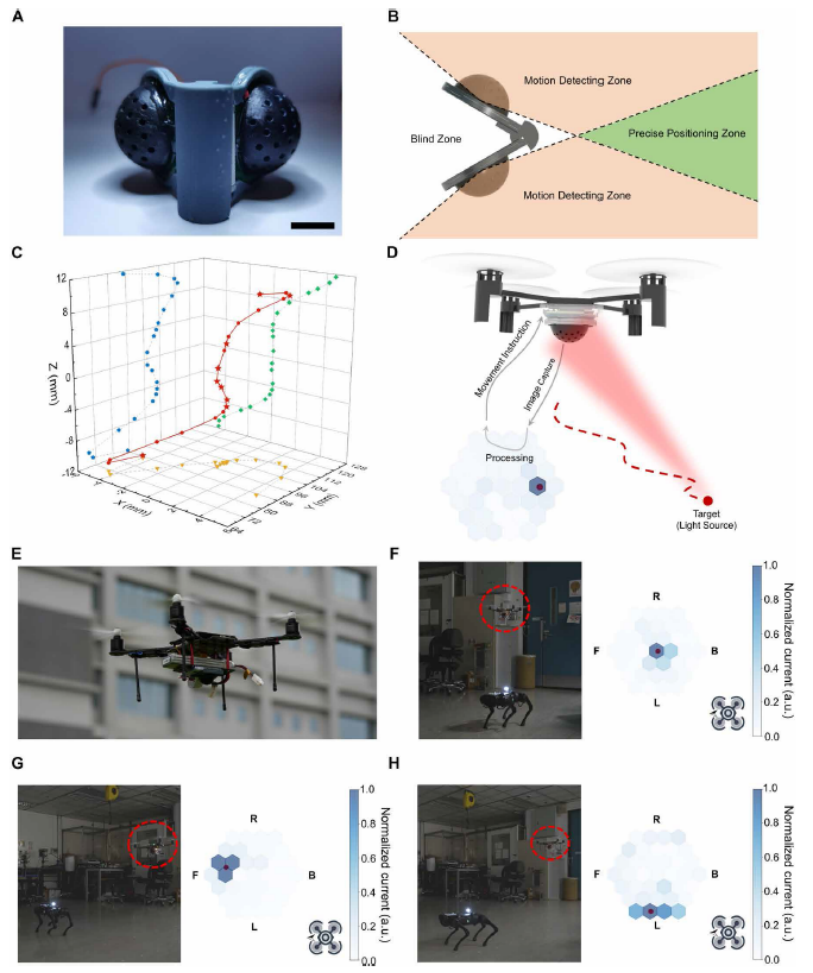
ЭМ4. PHCEЯЕЭГЕФФПБъЖЈЮЛКЭЮоШЫЛњдЫЖЏИњзйЁЃЃЈAЃЉАќКЌСНИі PHCE ЕФЫЋФПЪгОѕЯЕЭГееЦЌЁЃЃЈBЃЉЫЋФПЪгОѕЯЕЭГЕФЙЄзїдРэЁЃЃЈCЃЉдк3DПеМфжавЦЖЏЕуЙтдДЕФПеМфЮЛжУКЭЩњГЩЕФвЦЖЏТЗОЖЁЃЃЈDЃЉЮоШЫЛњдЫЖЏИњзйЕФЙЄзїдРэЁЃЃЈEЃЉАВзАдкЮоШЫЛњЩЯЕФPHCEееЦЌЁЃЃЈFЃЉ-ЃЈHЃЉЙтдДКЭЮоШЫЛњвЦЖЏЦкМфЕФЯрЖдЮЛжУееЦЌвдМАгЩЮоШЫЛњЩЯЕФPHCEВЖЛёЕФЯргІЭМЯёЁЃ
вЊЕуЃКЮЊСЫОЋШЗЖЈЮЛЕуЙтдДдк3DПеМфвЦЖЏЙьМЃЃЌбаОПепНјвЛВНЙЙНЈСЫЛљгквЛЖдPHCEЃЈЗжБ№Опга37ИіаЁблЃЉЕФЫЋФПИДблЯЕЭГЃЌЦфжаСНИіPHCEжЎМфЕФНЧЖШЙЬЖЈЮЊ60ЁуЃЌећЬхЪгГЁдіМгЕН220ЁуЁЃЫЋФПЯЕЭГПЩНЋећИіЧјгђПЩвдЗжЮЊШ§ВПЗжЃЌМДУЄЧјЁЂдЫЖЏМьВтЧјКЭОЋШЗЖЈЮЛЧјЁЃЫЋФПИДблВЖЛёдЫЖЏЙтдДдкВЛЭЌЮЛжУЕФЭМЯёЃЌбаОПепПЩвдНтЮіетаЉЮЛжУВЂжиНЈЦфдк3DПеМфжаЕФдЫЖЏЙьМЃЁЃгЩгкPHCEЯЕЭГГіЩЋЕФНЧЖШбЁдёадЃЌбаОПепНјвЛВННЋЦфАВзАдкПЩБрГЬЕФЩЬвЕЮоШЫЛњЩЯЃЌЪЕЯжСЫЖддигаЕуЙтдДЕФЫФзуЛњЦїШЫдЫЖЏЕФЪЕЪБЖЈЮЛКЭзЗзйЁЃ
злЩЯЫљЪіЃЌЪмЕНРЅГцИДблЯЕЭГЕФЦєЗЂЃЌбаОПепЩшМЦВЂжЦдьСЫвЛжжЖРЬиЕФеыПзИДблЯЕЭГЃЌОпгаЙуРЋЕФЪгГЁЁЂОЋШЗЕФФПБъЖЈЮЛКЭЖЏЬЌдЫЖЏИњзйФмСІЁЃЭЈЙ§НјвЛВНИФНјКЭММЪѕЩ§МЖЃЌАќРЈЫѕаЁЩшБИГпДчЁЂдіМгаЁблЪ§СПЁЂЬсИпГЩЯёЗжБцТЪКЭЯьгІЫйЖШЃЌИУИДблЯЕЭГгаЭћЪЕЯждкжЧФмЙтЕчДЋИаКЭЛњЦїШЫММЪѕСьгђЕФЙуЗКгІгУЁЃ