1. ЬсГіСЫЛљгквфзшЦїЕФФЃФтЪ§зжЛьКЯМЦЫуЛњдкЛњЦїШЫПижЦСьгђЕФгІгУЁЃИУЛьКЯМЦЫуЦНЬЈдкЪ§зжМЦЫуЕЅдЊжаЪЕЯжСЫИпМЖЫуЗЈЃЌЖјдкФЃФтМЦЫуЕЅдЊжаЪЕЯжСЫДЋИаЦїШкКЯЃЈМгЫйЖШМЦКЭЭгТнвЧЃЉЃЌТЫВЈКЭдЫЖЏПижЦЫуЗЈЁЃ
2. баОПШЫдБЭЈЙ§РћгУвфзшЦїЕФПЩБрГЬадЃЈПЩБрГЬЕчЕМТЪЃЉЪЕЯжСЫЪЪгІБфЛЏЛЗОГЕФЛњЦїШЫдЫЖЏПижЦЁЃетжжЗНЗЈИУЗНЗЈдкМЋДѓЕФНЕЕЭЯЕЭГбгГйКЭЙІКФЕФЭЌЪБЃЌЬсЩ§СЫЛњЦїШЫЕФадФмЁЃ
гЩгкЮяРэЖЈТЩЕФЯожЦЃЌФІЖћЖЈТЩжеНЋзпЕНОЁЭЗЃЌФПЧАНјвЛВНЭЈЙ§ЫѕаЁОЇЬхЙмРДЬсИпМЦЫуЛњЕФадФмвбОЗЧГЃРЇФбЁЃ
етИіЮЪЬтВЛНіЯожЦСЫЭЈгУМЦЫуЛњЫуСІЕФНјвЛВНЬсЩ§ЃЌвВЭЌЪБЯожЦСЫЛњЦїШЫСьгђЕФЗЂеЙЁЃгыЮвУЧШеГЃЪЙгУЕФМвгУМЦЫуЛњВЛЭЌЕФЪЧЃЌЛњЦїШЫЕФМЦЫуЦНЬЈашвЊЪЕЪБДІРэДЋИаЦїаХЯЂКЭПижЦжДааЦїЁЃЫцзХЛњЦїШЫСьгђЕФВЛЖЯЗЂеЙЃЌЦфНсЙЙвВБфЕУИќМгИДдгЁЃ
ЖјЫуСІвбОЧїгкБЅКЭЕФДЋЭГЪ§зжМЦЫуЛњдкЮДРДНЋКмФбТњзуЛњЦїШЫШевцдіГЄЕФЫуСІашЧѓЁЃЫљвдЃЌЩшМЦвЛжжФмЙЛЪЕЪБДІРэИДдгаХЯЂЃЌВЂОпгаЕЭбгГйКЭЕЭЙІКФЕФзЈгУМЦЫуЛњПЩвдНтОіЕБЯТЛњЦїШЫСьгђЛсгіЕНЕФЮЪЬтЁЃ
ЕБЧАЃЌЪ§зжМЦЫуЛњдкетМИЪЎФъЫцзХМгЙЄЙЄвеЕФВЛЖЯЬсИпЕУЕНСЫОоДѓЕФЗЂеЙЃЌЕЋЪ§зжМЦЫуЛњЕФЫуСІКЭЙІКФЛЙЪЧЮоЗЈКЭШЫФдЯрЬсВЂТлЁЃ
ДЋЭГЪ§зжМЦЫуЛњОПОЙЛсГЏзХЪВУДЗНЯђЗЂеЙЃЌЦфЫуСІЕФМЋЯоЪЧЪВУДЪЧ21ЪРМЭзюживЊЕФПЦбЇЮЪЬтжЎвЛЁЃЫфШЛетИіЮЪЬтФПЧАУЛгаД№АИЃЌЕЋЩёЦцЕФДѓздШЛвбОИцЫпСЫЮвУЧД№АИЪЧДцдкЕФЃЌШЫФдЛђепЫЕЩњЮяЕФДѓФдОЭЪЧздШЛНчИјЮвУЧЕФД№АИЁЃ
ЕЋДѓздШЛВЂУЛгаИцЫпЮвУЧОПОЙШчКЮФмДяЕНетИіД№АИЁЃФПЧАШЫРрЖдДѓФдЛЙУЛгаЭъШЋРэНтЃЌЫљвджЛФмЭЈЙ§МђЕЅЕФФЃЗТРДНјвЛВНЬсИпМЦЫуЛњЕФадФмЁЃШЫЬхЕФПижЦЪЧЪЎЗжИДдгЕФЃЌШЫФдЭЈЙ§ДѓФдКЭаЁФдЕФазїЭъГЩШеГЃЛюЖЏЃЌДѓФдИКд№ЯывЛаЉЦцЦцЙжЙжЕФЖЋЮїЃЌаЁФдИКд№ЩэЬхЕФдЫЖЏЁЃ
ФЧЛњЦїШЫЕФМЦЫуЕЅдЊФмВЛФмНшМјетИіНсЙЙРДНјаагХЛЏФиЃПД№АИЕБШЛЪЧПЩвдЕФЁЃ
Ъ§зжМЦЫуЛњзїЮЊжїСїЭЈгУМЦЫуЛњЃЌЦфМЦЫуОЋШЗЃЌПЩБрГЬадИпЁЃ
ЕЋгЩгкФкДцКЭМЦЫуЕЅдЊЕФЗжИюЪЙЕУЦфМЦЫуаЇТЪВЂВЛЪЧКмИпЁЃФЃФтМЦЫуЛњжБЕНЩЯЪРМЭ80ФъДњЛЙгадкбаОПКЭгІгУЁЃ
ЕЋгЩгкЦфМЦЫуОЋШЗЖШВЛИпЃЌПЩБрГЬадВюЃЌТ§Т§БЛШЫУЧЫљвХЭќЁЃ
ЕЋФЃФтМЦЫугаЫйЖШПьЃЌбгГйЕЭЕШЬиЕуЁЃЖјЛњЦїШЫзїЮЊПижЦЯЕЭГЃЌЦфБОЩэЕФТГАєадЪЙЕУЦфЖдМЦЫуОЋШЗЖШвЊЧѓВЛИпЃЌЖдЯЕЭГЕФЕЭбгГйвЊЧѓКмИпЁЃ
ЫљвддкЛњЦїШЫЯЕЭГжаВЩгУЪ§зжФЃФтЛьКЯМЦЫуЛњЃЌдкЪ§зжМЦЫуЕЅдЊжаЪЕЯжСЫИпМЖЫуЗЈЃЌЖјдкФЃФтМЦЫуЕЅдЊжаЪЕЯжДЋИаЦїШкКЯКЭдЫЖЏПижЦЫуЗЈПЩвдНЕЕЭЯЕЭГбгГйКЭЙІКФЃЌВЂЭЌЪБЬсЩ§ЛњЦїШЫЕФЖЏЬЌадФмЁЃ
етжжЛьКЯМЦЫуМмЙЙдчдкЩЯЪРМЭОЭгагІгУЕНзуЪНЛњЦїШЫМЦЫуЦНЬЈЩЯЃЌЕЋгЩгкФЃФтМЦЫуБОЩэПЩБрГЬадВюЃЌМгЩЯЪ§зжМЦЫуЛњЕФЗЂеЙЃЌетжжМмЙЙКѓРДУЛгаЕУЕНЙуЗКгІгУЁЃ
авдЫЕФЪЧЃЌНќФъРДвфзшЦїЕФЬсГіКЭЗЂеЙЃЌЪЙЕУПЩБрГЬадЕФФЃФтМЦЫуЛњЕФДѓЙцФЃгІгУГЩЮЊПЩФмЁЃ
ЭМ1. ЛљгквфзшЦїЕФФЃЪ§ЛьКЯМЦЫуМмЙЙЁЃ
ГЩЙћМђНщ
гаМјгкДЫЃЌФЯМгжнДѓбЇЮтЮЕПЮЬтзщЬсГіСЫЛљгквфзшЦїЕФФЃЪ§ЛьКЯМЦЫуЦНЬЈдкЛњЦїШЫПижЦСьгђЕФгІгУЁЃбаОПШЫдБЭЈЙ§РћгУвфзшЦїЕФПЩБрГЬадЃЈПЩБрГЬЕчЕМТЪЃЉЪЕЯжСЫздЪЪгІЕФЛњЦїШЫдЫЖЏПижЦЁЃетжжЗНЗЈИУЗНЗЈдкМЋДѓЕФНЕЕЭЯЕЭГбгГйКЭЙІКФЕФЭЌЪБЃЌЬсЩ§СЫЛњЦїШЫЕФадФмЁЃ
вЊЕу1ЃКвфзшЦїЕФНсЙЙКЭ ЕчбЇЬиад
вфзшЦїЕФНсЙЙКЭПЩБрГЬЬиадЕФЪЕбщНсЙћШчЯТЭМЁЃЭЈЙ§ЕїНкЕчбЙКЭЭЈЙ§ЕчСїЃЌвфзшЦїПЩвдБЛОЋШЗЕФПЩБрГЬЕН174ИіВЛЭЌЕФЕчЕМТЪжЕЩЯЁЃ
ЭМ2. вфзшЦїЕФНсЙЙКЭЦфдкжБСїЕчбЙЛђепТіГхЕчбЙЯТЕФПЩБрГЬЖрЬЌЕФЕчбЇЬиадЁЃ
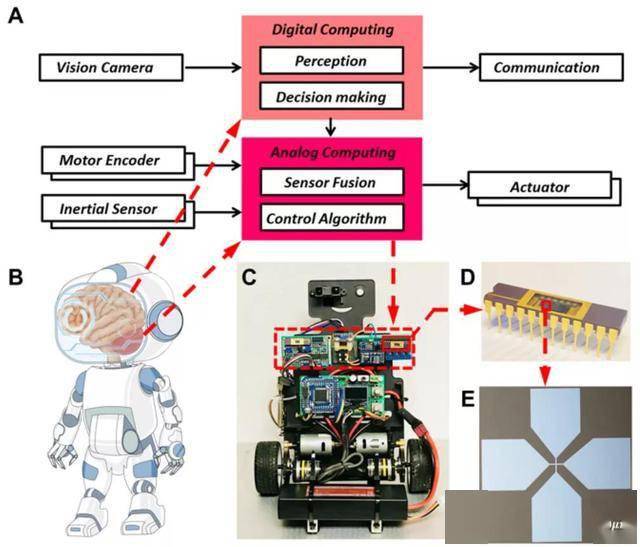
вЊЕу2ЃКРћгУвфзшЦїПЩБрГЬадПижЦЛњЦїШЫдЫЖЏ
РћгУвфзшЦїЕФПЩБрГЬадЃЌбаОПШЫдБЪЕЯжСЫМђЕЅЕФПЩБрГЬЕФПЈЖћТќТЫВЈЦїЖдЛњЦїШЫЕФДЋИаЦїЃЈЭгТнвЧКЭМгЫйЖШМЦЃЉНјааТЫВЈЃЈЭМ1ЃЉЁЃТЫВЈКѓЕФаХКХБЛЛљгквфзшЦїЕФФЃФтБШР§ЮЂЗжПижЦЦїЃЈPD controllerЃЉНјааЯТвЛВНДІРэЃЈЭМ2ЃЉЁЃРћгУвфзшЦїЕФПЩБрГЬЬиЕуЃЌбаОПШЫдБЩшМЦСЫЫцЛњЫбЫїЫуЗЈРДгХЛЏвфзшЦїдкЕчТЗжаЕФВЮЪ§вбДяЕНзюгХЛЏЛњЦїШЫПижЦЕФВпТдЁЃ
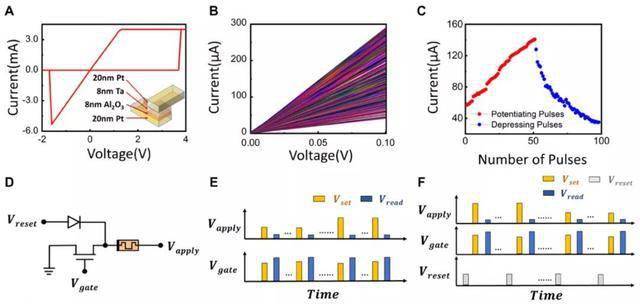
ЭМ3. ВЩгУвфзшЦїФЃФтЕчТЗДюНЈЕФПЈЖћТќТЫВЈЦїЪЕЯжЕФДЋИаЦїШкКЯЫуЗЈЁЃ
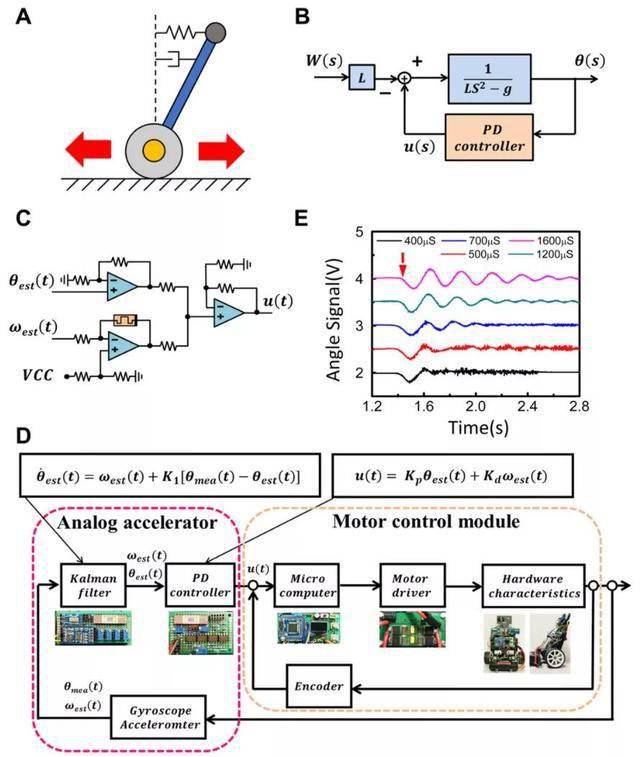
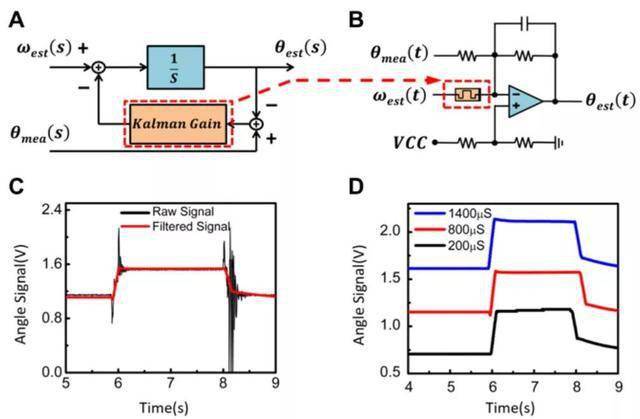
ЭМ4. ВЩгУвфзшЦїФЃФтЕчТЗДюНЈЕФБШР§ЮЂЗжПижЦЦїгУгкЛњЦїШЫПижЦЁЃ
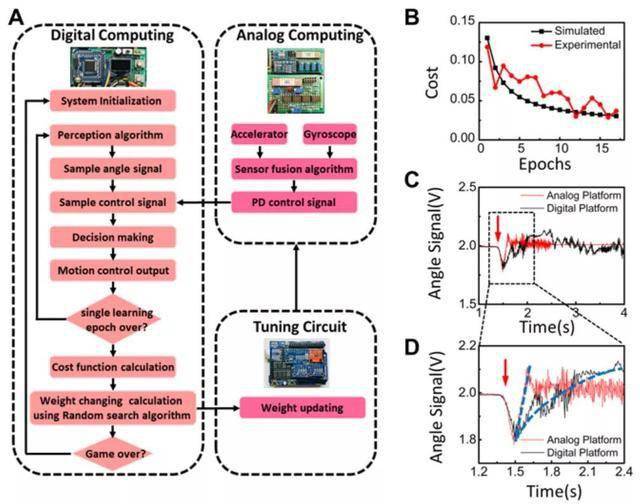
ЭМ5. ВЩгУбЇЯАЫуЗЈгХЛЏЛњЦїШЫПижЦВпТдРДЬсЩ§ЛњЦїШЫЖЏЬЌадФмЁЃ
аЁНс
етЯюЗЂУїбаОПЬсГіВЂбщжЄСЫЛљгквфзшЦїЕФФЃФтЪ§зжЛьКЯМЦЫуЛњдкЛњЦїШЫПижЦСьгђЕФгІгУЁЃбаОПШЫдБЭЈЙ§РћгУвфзшЦїЕФПЩБрГЬадЃЈПЩБрГЬЕчЕМТЪЃЉЪЕЯжСЫЪЪгІБфЛЏЛЗОГЕФЛњЦїШЫдЫЖЏПижЦЁЃетжжЗНЗЈИУЗНЗЈдкМЋДѓЕФНЕЕЭЯЕЭГбгГйКЭЙІКФЕФЭЌЪБЃЌЬсЩ§СЫЛњЦїШЫЕФдЫЖЏадФмЁЃетЯюЙЄзїБЛIEEE SPECTRUMКЭЦфЫћУНЬхНјааСЫБЈЕРЁЃ