���˹̹����ѧ�������ʵ���ҵ��о���Ա�Ըü�����������չ�����ڣ�ֻ����һ������� ���뷿�䣬�Ϳ��Կ��������������Щʵ�
������ɲ������������õġ�δ�����ü����������Զ���ʻ�ȼ���������˾��������ǰ���������ڹսǴ���DZ��Σ�գ���߰�ȫ�Ժͱ���������
�������ӣ�
https://www.computationalimaging.org/publications/keyhole-imaging/
1 MIT��������۳�����
��ʵ�����߳��������Ѿ��ˣ��������ϣ����ȷ��һ������ļ�����
��ǰ���ü����Ѿ���������ذ��ǽ��������ƽ�棬��Щƽ��һ�㴦��������ͱ��ڵ���������߷�Χ�ڡ�Ȼ��һϵ������������ļ������壬����Щƽ��ı����Ϸ�����Ȼ�������ص������Ϸ��������ջص�������Ĵ������ϡ��㷨���ùⷴ���ʱ���������������������ͼ��
�ź����ǣ���Щ����ͼ��ķֱ��ʲ��ߣ�������˻�����һ����ȷ��������ʲô��
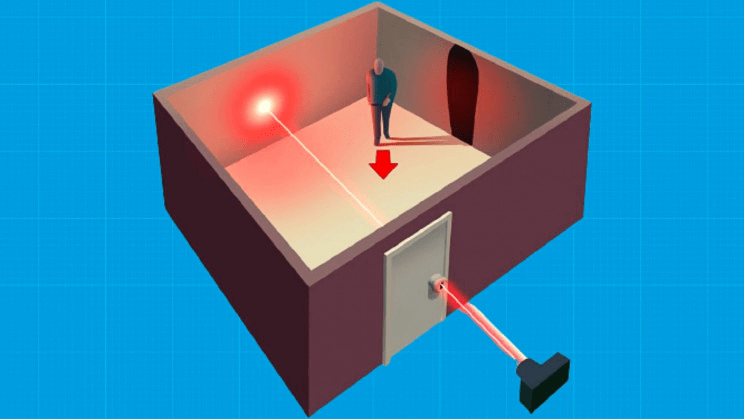
��Σ�MIT���о���Ա������ƺ���������۳���keyhole imaging���ķ�����
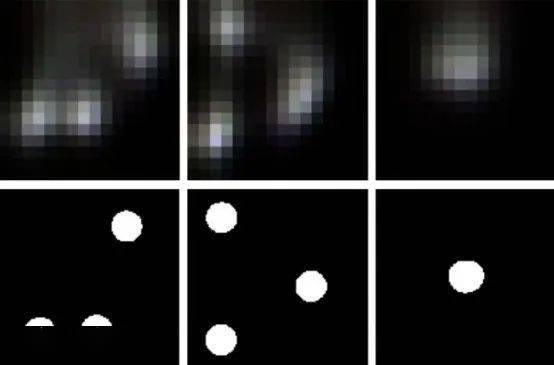
������������Ҳ���Բµ���Ҫ���������շ����ڵ����壬����ֻ��Ҫһ��С�ף�����Կ����ӿף��ü������������������ǽ���γ�һ����㡣
�������������ƣ��������ǽ�ϡ����������Ϸ����������Ĺ�������ͨ��С�ڷ����������������һ��������ѩ�����̽�����������Ƿ��ص�ʱ�䡣
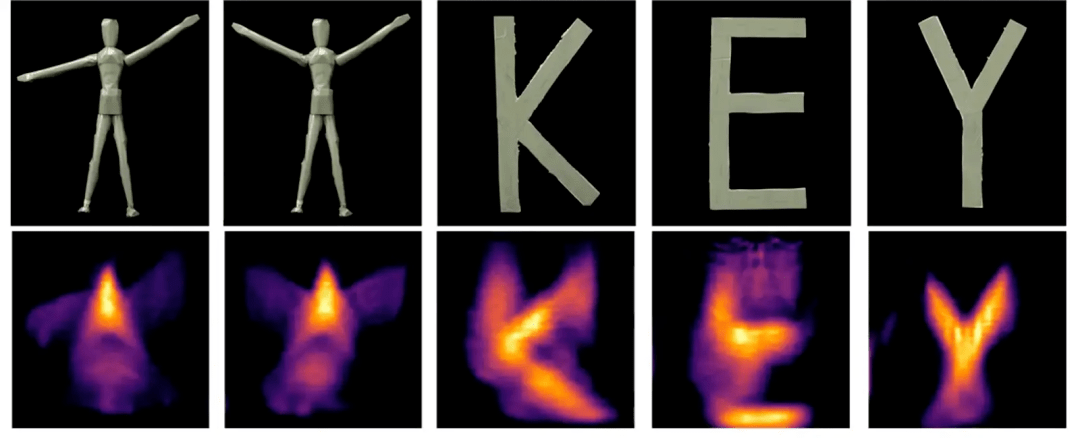
������������Ǿ�̬�ģ����۳������õ��㹻����Ϣ��Ϊ���ƹ�������⣬�о���Ա���֣����ǿ����ü����������һ���ƶ������壬���ּ����ܹ��ڽϳ����ع�ʱ���ڲ����㹻�Ŀ������ݣ��Ӷ�Ϊ�㷨���������ͼ���ṩ�㹻����Ϣ��
����ͼ��ʾ��ľ������ģ�Ϳ�����������һ���������뾭���ʵ�ѵ����ͼ��ʶ���˹���������ʱ��ȷ����������һ���ˣ����������壩���Ƿdz����еġ�
�����Զ���ʻ�����⣬�����о�δ��������Э���������ư��������磬Ҫ�����Ŷ���ǰ����ij������ķ��գ�ֻ������ǽ�ϵ�һ��С�ѷ����
ͬʱ�������¼���������Ϊ��������ϵͳ�ṩ�µ�˼·������ǰ�������⼼����ʵ�õ�����£�����в֮ǰ�ͷ������ص�Σ�����ء�
2 ���ù������ӰҲ�ܻ�ԭ�ڵ���
��ؼ����� MIT ��Ҳ����������
2019�꣬MIT �������ѧ���˹�����ʵ���������������ͨ��ϸ����Ӱ�ͷ������ֱ��ڵ��Ķ�����Ҳ����˵���������֮��ʹ���������Ұ֮������������Ҳ���Խ������֡�
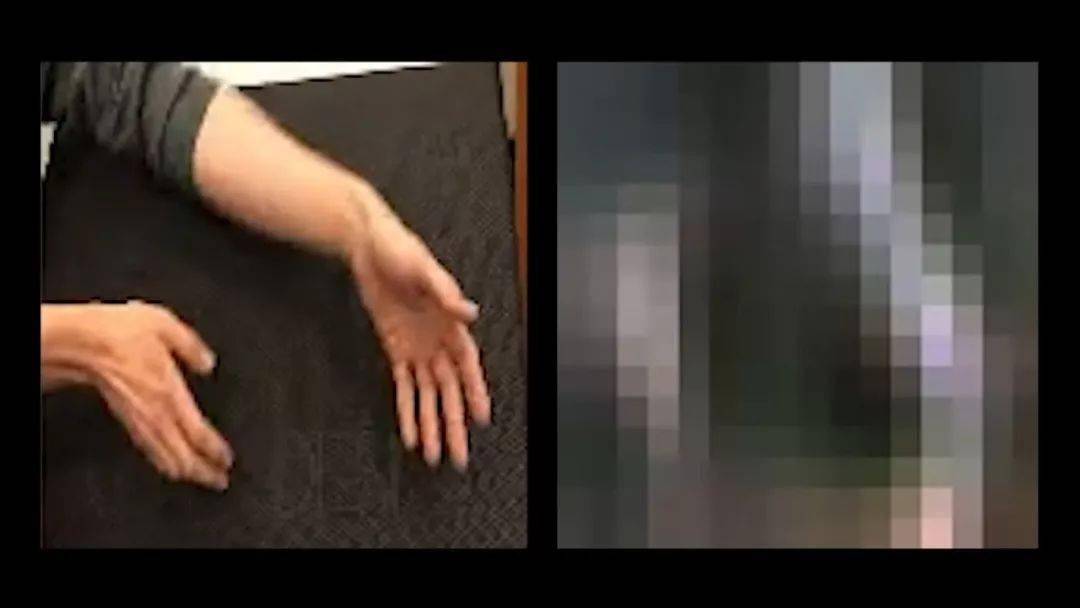
MIT���о�Ա�ǻ������������ƵͶ���ڸ��������ϵ���Ӱ��Ԥ�������������ݡ�����һ����ʾ�����о�Աʹ�����ַ������ֵ��Ӿ�Ԫ�أ�����һ������ԭʼ���塣
ͨ���۲���Ӱ�ͼ���ͼ��֮�������ã��µ��㷨����Ԥ����ڳ����еĴ�����ʽ��������䡱��Ȼ�����������ִ�����ʽ�ӹ۲쵽����Ӱ�й��Ʊ����ص����ݣ��������Թ������˱��ݵĴ���������
�ü����ǡ������ġ�������ζ�ŶԳ���û�м����������Ԥ������������Ҫ��Լ2��Сʱ�Ĵ���ʱ�䡣�о���Ա��ʾ���ü���������������������֮��ij���������������������Ӧ�á�
��ͨ��ʹ�÷��Ӿ�����豸�����缤����������������������������ǵķ����У�ֻ��ʹ����Ȼ��������Ĺ��ߣ������Գ��������Щϡȱ����Ϣ����ǰCSAIL��ʿ��NVIDIA�����о���ѧ�ң��¼�����ϯ�о�ԱMiika Aittala��ʾ�� ����������������½�չ�����ƺ���һ���ܺõ�ʱ�������Խ�������������ǰ����Ϊ���������һЩ��ս����
Ϊ�˲�����Щ����������Ϣ���Ŷ�ʹ����ϸ�ļ��������ʾ�����类�۲��������ҵ���Ӱ�߹⡣��ij�̶ֳ��ϣ�һ���������Ϊ�е���������������������Сѧ��ѧ���п��ܻ������Ķ��������赲��һЩ���ߣ���������������ͨ�������������ںδ������Ƕ�������Χ������ͼ��
����������������Ϊ������ͨ�������γɿɶ�ͼ��Ĺ��ߣ���ôһ�����ҵ�����������ʶ��ĵ�ͼ��ͨ����䣩�����ҵ���Ӱ�ĸ����˶���
���Խ����������һ�澵�ӣ�ʹ���ǿ��Կ�����Χ�Ļ���������������ֱ�ӿ����Ľ��䡣����㷨���������ս��ҪŪ�岢������Щ��������ʾ��
��ô�����Dz����֡�ѧ���ˡ���
���ּ��������������������ӵ�С����ۡ���������IJ�Զ�ˡ�