��Ҫ
��ϵͳ�Ľ�������ͨ���ڲ����������������ս����������������£�����Щ��ս�����ͬ���֡�
��������У�����ּ���˽���Щ�ڲ������Ľṹ���Լ�����Ż������Խ������Ϣ��һ�����崫�ݵ���һ�����塣
��ˣ���������ǰ��ʦ��ͨ��Э��Ϊ�����������˸������������γɼ����������ֵ�Ӱ�졣
���������������Թ���ʹ��ǿ��ѧϰ�����н�ʦ���罫��Ϣ���ݸ�ѧ�������������֡�
�������������ǽ����������������������������
�����ڵ�ά�����ռ���ѹ����ά������Ϣ����ģ����Ȼ����������
��֮ǰ�Ľ��һ�£����Ƿ�����ѧ���ṩ��ʦ��Ϣ���������������ʺͷ�����ǰ��δ�����������������
���⣬�Ż���Ϣ���������ѧ���������ԸĽ���Ϣ���룬�������Ϣ�ռ��е�ȷ������Ҫ˫�����롣
��Щ���ͻ����������Ϊ������֮��ij������������ü���Է���������Ӱ�졣
����
��̽��������˹��������е��������ʱ���о���ͳ��ǿ�����Ҿ����ͬ��·��������á�
��Ȥ���ǣ�������������ͬ�ֶ���֮��������Ϊ�Ļ�����
��ʵ�ϣ���ͬ�������������ͬһ���ֻ�Ⱥ��ĸ���֮��Ľ���Ҳ�DZز����ٵġ�
�������ѹ����ζ����·�����Ѿ������������ڲ���������Щ�����������ض��������ã����ҿ�������ȵ���߹�ͨЧ�ʣ��ⱻ��Ϊ����֪��չ���DZز����ٵġ�
������Ϊ���ͨ�Ŷ����ṩ�����Ч�ı���������Ҫ����Щ����֧���˺���������֮�侭��ķ�����
�����ĺ�ͨ�Ÿı���������ļ�����Թ�����������Ϸ�����벢�õ�����������νṹ��������֧�֡�
�������������о������������˹����Խ��������������ƣ��Լ����ֽṹ�����ཻ�������Ƴ̶ȡ�
�������ѧϰ�����룬�����˴�������������ϵͳ��ͨ�Ų������ϵĹ�����
������Զ���������Ϸ���о������������巢�ͺͽ�����ɢ��Ϣ��ִ�������������Լ�ͨ������������ƶ��ײ���ԡ�
��һ���Ĺ���ǿ������ʵ��������Ҫ�ԡ�����ӿ���п�ѧģ�ͻ�Ӧ��ģ��֮��ĶԱȺͶ����������ѧϰ��
Ȼ������Щ�о�����ع�עͨ��ϵͳ�����ܽ���������Ǽ�鹲�����������ʡ�
Ϊ�������������ڲ�����֮�������ã����ǽ�����ʦ����ܵĻ����ϣ�������һ��ͨ��Э�飬�����������ڽ����ͬ�����ͬʱ���к�����
���Dz���ǿ��ѧϰ ��RL�� ��ܣ���ǰ�������˹������壬�����������������ľ����������
ʹ��������� RL ��ʦ����ܣ����ǿ��Է�������Ϊ������������Ҫ�������������������ԡ���������������з��ͺͽ�����Ϣ�����ܷ�������˵���˿������������ڲ�����Լ�������������������������Դ���������������������ǰδ�����������Ϣ��
����ǰ�Ĺ�����ȣ�����רע���������صı��������������֮�乲�����Լ���ά���Կռ�Ľṹ��ʲôӰ�졣
���Ƕ����������ر����Ȥ��������������ڲ�������ʵ����ı�������Щ�������ת��Ϊһ��ͨ�õġ��ɹ��������ԣ��Լ���ЩԪ�صĽ�����
��ˣ�����ѡ����һ������ɢ����ģ����ֱ�ӱȽϴ��Թ��̺���ʵ��������������ԡ�
ͨ����ִ�е�������� RL �������ṩ��ѧϰ��Ϣ���͵�����ģ���У����ǵ�������Ȼ���Եķ�չ����Ϊ��Դ�����;��߹��̡�
��¸��Ի������л��س��֣������DZ�Ԥ����ģ�����ලѧϰ�����γ������Աȡ�
ͨ����������Ƕ��Ľṹ�����ǿ��������˽���Ϣ�ռ��е���Ϣ���ݼ�����֧���������ܺͷ����������Ĺ�ϵ��
���⣬������ǰ���ල���ŷ�����ͬ����������������ģ���л�ȡ�����Լ�����ͨ��ϵͳ���� Bee Waggle Dance�����������Ļ���ת��Ϊ������Ϣ�ռ䣬Ҳ�����������ԡ�
�ܶ���֮�����������һ�����ڴ����Ŀ�ܣ������о�ӿ�ֵ�ͨ�ţ������ѽ����Ķ�����������ģ�͡�
���ǽ���ڲ���������Ϣ�ռ�֮��Ĺ�ϵ��Ϊ��ѧ�����˹����������������������������
•��ʾ��άǶ��ռ��еĽṹ�������������ѧ���ɹ�������������ġ�
•��ʾ����ͨ�������ṩ�������Ż�ѧ������ʱ����θı��άǶ�����Ϣ�ռ�Ľṹ����ǿ��Ϣ���ݡ�
•�˽�������о��Գ�ͨ����ʹ�����ر������������ߺͽ����߿��Ի�������������Եĸ������һ����Ҫ��ս��
���
ģ�ͼܹ�
Ϊ���о�������֮�����Եij��֣����Ƕ����������������Ϣ�������壺��ʦ��ѧ����
�����������嶼����ģΪ��������磬���н�ʦ������ RL ����н���ѵ����ѧ��ѧϰ���ͽ�ʦ��ָ�
����ʹ�� RL ����Ϊ���ǶԷ����ɸ��徭��Ͳ��Բ����Ĺ����Ϳ��ƹ�ij������Ȥ��������Ԥ��ȷ���ı�ǩ��
���⣬RL �ṩ������ѧ��ֱ�۶�ǿ�����ϵ�����ǵ�Ŀ�����������������˽�����ӿ�ֵĻ��ƺ�������
�����ǵ������У���ʦ�����屻����һ���������������ȫ������۲�ͽ�����
����һ��������ѵ����ʦ������㹻����Ϣ����������
��ʦ����ּ�����������״̬-����ֵ������ Q ���� ��Q��s�� a���������а���״̬-�����Ե�Ԥ�ڷ��أ��������ģ�ͺͷ����ߵ���ʽѧϰ��
Ȼ��ѧ��ּ�ڽ����ͬ������ʹ��������ʦ�ĸ�����Ϣ�����ǽ����Ϊ����Ϣ����
��ˣ�ѧ������ͨ���۲����ʦ����Ϣ��ѧϰ���������
�����ǵĿ���У����Ǽ���ÿλ��ʦ�۲첢�ӵ���������ѧϰ��Ȼ����ص�������Ϣ�����磬�� Q �����еó�����Ϣ�����ݸ�ѧ����
ͨ�����ַ�ʽ��ѧ������ͨ����ȷ����������Ϣ���ɹ����������δ����������
ͼ 1��ʹ������������������ѹ��Ϊ��ά��Ϣ������ʦ��ͨ��ģ�͡�

a ģ�Ͳ�ͼ�����һ��ͨ��ѧ�������壬��������ӽ�ʦ������������ո����������Ϣ��ѧ��ѧϰ������Щ��Ϣ��Ȼ��ִ���������
b����ͼ�������Ե�����������ѵ���Ͳ��������壬�Է������ѧϰ��ܡ�����������½ǿ�ʼ��Ŀ���Ǿ������ٵIJ����ڵ���Ŀ�꣨��������ͬʱ�ܿ�ǽ�ڣ�dz��ɫ���飩����ͼ�е����˽�ʦ������ѧϰ������ʾ�����ԡ�ѧ����Ҫ�������յ�����Ϣ�ı���汾����Ϣ��mi�����ܰ��������ָ���ѧ����⣨��ɫ���飩��
c ���о���ʹ�õ���ϸͨ�żܹ��������ַ����У�������Ϣ�������ǵĿ����ΪQ���������ɽ�ʦ������ѧϰ��Ȼ��ͨ��ϡ���Ա����������������壩���ݣ�������صĵ�ά����mi����û��ѧ������ʱ����ͼ������Щ����miֱ���ṩ��ѧ����ѧ��ѧϰ��������Խ������i������ѧ������������£���ͼ�������ǻ�����ѧ�����ֵķ����ش�������ѵ���У���ǿ��Ϣ��ʵ���ԡ�����ʾ��ͼ����ͼ������ˡ��ջ����ܹ���ѧ����һ������ר�ҽ�ʦ����Ϣ�Ͻ���ѵ����һ�����㹻����������������Ϣ�ͻᴫ�ݸ��Լ�������ʹ�÷���ѵ��������Ƕ�룩�����о���Ա��ֵ�Ӱ�졣
�ܹ���ؼ�����ɲ�����ͨ�Ź��̡���Ȼ���Ա�����ά����ĵ�ά������
��һ����������һ���彻̸ʱ�������ߴ�����ij������ĸ�ά�����������磬ʱ�䡢λ�á���״�������ģ�������Ϊ��ά�ʻ�����ôʻ���ڽ����ߴ����б�����ظ���ά�ķֲ�ʽ������
�۲쵽���������Ա�������������Ժ͵�άǶ��ռ�֧������һ��ʹ��Ի����������֮����һ�µġ�
Ϊ��ģ�����ֽ���������������ϡ���Զ������� ��SAE�������ӽ�ʦ�����ȡ��Ϣ������һ��ѹ����Ϣ m������Ϣ������һ�ݸ�ѧ����
SAE Ҳ�������磬�������֣��������ͽ���������ɣ����ٽ��˵�ά������ϡ���ԡ�
����������ʦ�������� Q ����ͶӰ����Ϣ m �ϣ�����Ϣ�dz���Ϊ K ��ʵֵ������
Ȼ������ʹ�ô���Ϣ����С�����ؽ� Q�� ����ʵ Q ֮��IJ��졣
���⣬��ϡ������˵�����������Ǽٶ����ԣ���ˣ����꿪�������ԣ��������Ǵٽ�ϡ���Եġ�
����ͨ������Ϣ�����ķ������ӵ��Զ���������ʧ����ʵ����һ�㣬����ѭ��СŬ����ԭ�����������ǵ��˹�ͨ�Ÿ��ӽ���Ȼ���ԡ�
�����������������Ϣ������ L��1��-NORM ����ᵼ����Ϣ�������㣬���ģ��ϡ���Ե���Ϣ���١�
һ����ʦ��SAE ��ѧ���������������Ͽ�����ͼ 1 �п�����
�����������������ֲ�ͬ������-ѧ������Э�顣
����ע����˿�ܲ�ͬ����������������Զ�ͨ��һ���������ӵķ�����
�෴����ʦ���ǵ���������ѵ��������ص�������Ϣ��
Ȼ����������ѵ�����Ժ�ѧ�������ͨ���ṩ����ѧ�����ֵ��Զ��������������������Ժ�ѧ����
�ӱ����Ͻ�����ʦ�����ԣ������ͷǷ������ڸ�����ͨ����Ϣ���ݹ�����ϵ��һ�𣬵����ᵼ�µ�������������ݶ�����
Foerster ���˲��������ַ����ı��塣�����о��ˡ����� Q ѧϰ��������ÿ�������嶼ѧϰ�Լ��������������������������Ϊ������һ���֡�
���������У������о������������Թ��е�Ŀ�굼������
����ѡ�������Լ����������������ѧϰ����Ϊ����ʵ�ּ����ˡ���ʹ�����ܹ�רע�ڷ�����Ϣ�ṹ���������о�������̽�����Է�������ã��Լ��������չ�������ӵĵ������õĿ����ԡ�
����ǿ���������ܹ��������������������Ϊ����京���Ԥ���ʻ㡣
�෴�������Ǵ�����͵�ά������Ȼ�ݱ�����ģ���ӳ����Ȼ���Ե��ݱ䡣
�����о���Ŀ������������i�� ������ѵ���������ɵĵ�ά�����Ľṹ��������������ĵ�ά���������Լ� ��ii�� �����Ѿ�ѧ������������Ƕ��ռ����Ϣ��������ı��֡�
��ά��Ϣ�Ľṹ
������ѵ��һ���ʦ�����һ���Թ�����ÿ����ʦ�����ض���Ŀ�ꡢλ�ú�ǽ�����á�
��������������ʹ�þ���ѵ�������Խ� Q ����Ƕ�뵽��ά�ռ��С������ȣ�������û��ѧ������������´��������ԡ�
�ɴ˲�����DZ�ڿռ佫ǽ��λ����ʾΪ��ά��������ͻ����ά�ȣ�Ŀ��λ���ǿɱ��ԵĴ�Ҫ������
���ֽṹ�ڵ�ά PCA ��ͨ����ɢ�������������Ŀ��λ�ã�ÿ�������ڵ��ص��ͷֲ���С��
��һ���ֱ�۵�Դ������һ����ʵ��������������û��ѧ������������½���ѵ���ģ��������� Q ������ؽ�����Ϣ�ռ������
��ˣ�Ϊ����ϡ���ʵ�������ؽ���������һ���ֲ�ṹ�����ȣ����������Թ���Ȼ����ÿ���Թ��У���������Ŀ��λ�á�
���۴���Ϣ�Ƿ��ѧ���а�����������ʾ�˽ṹ������ע���������ʹ�����Լ��������ֵ�ֽ�������Ա���ʱ������û���������������ķ��顣
ͼ 2��ѧ����������Ч�ú����ı�����Ƕ�롣

a ���� ��1 �ڵ� 4 �� 4 ���Թ������п��ܵ�����û��ѧ�����������Ա����л�õĴ�С K = 5 �ĵ�ά��Ϣ�����ɷַ��� ��PCA����i�� �����ɷֽ��͵ķ��ii��-iii�� �ֱ�������ɵ�ǽ��λ�ã���ɫ��ָû��ǽ���Թ���������λ��ͻ����ʾ����Ϣ��
b ��Ϣ����Ľ�����ڰ���ͨ��ʹ�õ�ʽ ��1�� ��Ϊ��ʧ������õ�ѧ��������i��-iii�� �������� ��a�� ����ͬ�ĸ��iv�� ��ʾ����ѡ�ĵ�һ��ѧ��������Step Up �� Right��ͻ����ʾ����Ϣ��
c ����ʾ�����������ѧ����������Ϣ�� PCA���� ii ������������
��Ȼͨ����Щά��ֱ�ӱ���������������ѧ���������ѵ�����������ھ���ѵ��������ͷ�����ƽ���������Ե���ѧ�����������������Ե������
���⣬���ֽ����Ǵ��ⵥ��ģ�������ӳ���Ե���Ȼ���֣��������ߺͷ�����֮��������л���
��ˣ���������Ϣ�ṹ��������ѧ���������Թ������Ե�������Ȼ�ݱ䡣���ַ�����ͨ�����������ѧ����������ѵ���ҵ�Ŀ��ĸ�����ʵ�ֵġ���ת��Ϊ������ʽ�ĸ����Զ���������ʧ����

����ͼƬ��ԭ�ġ��������½��еķ��̶��壬�� ��һ�����Ż��ij�������
��ѧ����ÿ������֮�����Զ�����£��� ��i�� ������Ϣ���ؽ�����ii�� �ٽ���Ϣ��ϡ���ԣ��Լ� ��iii�� ���ѧ���յ���Ϣ�ijɹ��ʡ�
ֵ��ע����ǣ����Կռ��DZ�ڽṹͨ����������������������仯��
��ʹ����ֲ���������, �������ò��پۼ���DZ�ռ��У�������ǽ��λ�ñ��ʱ�γɸ��������ݶȡ�
��ˣ������ı��˵�ά����������Ա�ѧ����ø������ȥ�������Ϣ�������ԣ�������״̬�ռ��ʵ����ɡ�
����ע����ڰ�Ŀ��λ�ñ������ʱ����Ⱥ�м���һЩ�ص�;��������Բ�����Ժ��Բ��ƣ���Ϊ���ܴ�������ͬ����ѵľ������ԡ�
���ֶԲ��ԵĹ�ע����ѧ����ʼ�ж��Ŀɱ��Զ��õ�ǿ�������п��Թ۲쵽��ת�����ϵ�����ѡ��֮������Է��硣
ͨ���ṩ�˲��Ա�ǩ�����Դ��ṩ�Թ���ǩת��һ�������ƹ㵽ѧ����ǰ��δ����������Ŀ�ܡ�
��1��ʾ����û��ѧ����������ѧ�����������������а�ǽ��λ�ú�Ŀ��λ�ý��͵Ŀɱ��Եı仯��
ֵ��ע����ǣ�������Ч��Լ��ʱ��Ŀ��λ����֮�����Ϣ�ɱ��Ի����ӣ����־��������ȷ����Ŀ��λ�õ���Ҫ�����ӡ�
�� 1 ��Ϣ�ռ����������Ŀ����ķ������

���ֶԲ��Զ�����״̬�ռ�Ĺ�ע�ƺ�����������ʹ�õ��Զ��������ļܹ������Dz��õĽ�ά������
���⣬����ϢͶӰ�����Խ���������Ҫά�����ල�����ռ�һ�¡�����ζ�Ŵ������ֱ���������ѧ���ɹ��Ļ�����
���ǿ�����չ�˷������˽ⵥ���Թ��IJ�ͬĿ��λ�õ�ѧ���������������г��� 80% �ķ����ɵ������ɷֽ��͡�
���νṹ���ж�ѡ������Ƕ���еõ��˺ܺõı�����ǰ�߱����������ڶ��Թ��ļ�����״���м�����ת����
�����������������Ϣ��νṹ����������ѧϰ�ͷ���������ע�����Щ��������ڼ����������
���Ե�һ���ؼ���������������ԣ����������Կ��Բ���;���磬��������е��������Ӧ��ӳ�䵽��������Ϣ��
Ϊ�˲������ǵ�ͨ��Э���ڴ����嵽��Ϣ�ռ��ӳ�����Ƿ�����˹��ܣ����ǽ����˵��������Է�����ͨ������Ϣ�ռ��еľ��루ŷ����þ��룩�� ��i�� �����ǩ�����Թ��еĿռ���죩�� ��ii�� ��ʦ�ṩ���Զ�����������Ϣ��Q �����бȽϡ�
��ǩ�еľ������ΪĿ���ǽ��λ��֮�����ļ�Ȩ�ܺ͡�
���֮�£��������ڿռ�ͻ��ڶ����ĺ���Ľ�ʦ Q ����ľ�����ʹ�� Frobenius ��������ġ�
ͼ 3��ӿ�����Եĵ��������Ժ��ط���
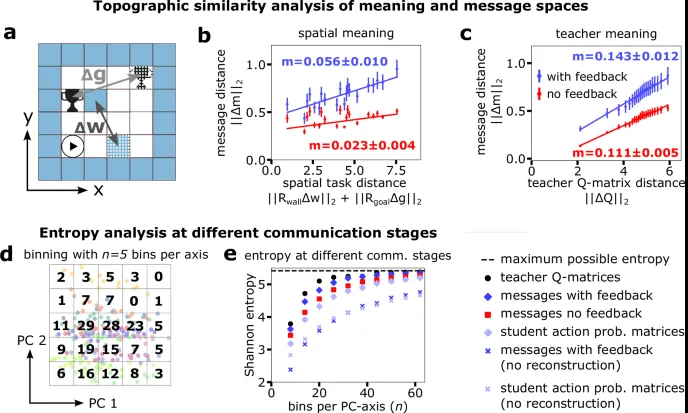
a ������������ 1��ʵ�ģ����� 2������֮���Ŀ�� ����g�� �ͱ� ����w�� ���������Ŀ��ӻ�����Щ������ڼ���ռ�������� ��t = �O�OR���ڣ���w�O�O��2�� + �O�OR��Ŀ�꣩��g�O�O��2���� ��b����
b�� c ��Ӧ��Ϣ�ijɶ����������ͳɶԾ���ıȽϡ���Ϣ���������ʹ��ŷ����÷���������Q �������ʹ�þ���ĵ�Чֵ Frobenius �������������ε����ĵ���յ�ֱ�� 5 �����Ե�ƽ��ֵ�� 1 �����m ��ָ������ϵ��ݶȡ�
d ͨ����ɢ�������ط�������ÿ���������͵Ĺ�һ��������ǰ���� PC ���з��䡣Ȼ����Բ�ͬ�� bin ��Сѡ������ء����������������ÿ�� PC ������ 5 �� bin ����ɢ��ʾ����bin �߳�������������ͬ����
e ����ÿ�� PC ��ɢ�����ر�����ʦ����Ϣ��ѧ����ϢЯ����������ȷ�����������ܵ����������Թ�����ľ��ȷֲ���
������ijɶԾ�����ͼ3��ʾ����Ϣ�ռ�ͺ���ռ���ʾ���������ԣ������Իع����б�ʲ�����ʾ��
�����б����Ϊ�������������ǻ����֣���û�з�����������ȣ�ʹ�÷���ѵ����������ʾ�����̶߳ȵĵ��������ԣ��Լ�����ԣ���
ӿ�ֵģ���ɢ��ͨ�ŵ���һ������������������С���أ�����ͨ��Ч�ʵ��ձ�ѹ����
Ϊ���˽�����Ч���Ƿ������ǵĿ�������֣�����ʹ����ũ�ؽ�������Ϣ�۷������Բ���������Ϣ����ϢЯ��������
���� Shannon �ؽ����ڲ�����ɢֵ������������������ǵ���Ϣ����������Ƕ��ռ䣬������ǽ���ϢͶӰ��һ�� bin �ϣ�Ȼ��������ɢ�ֲ����ء�
Ϊ�˿��ӻ�Ŀ�ģ�����ֻ��ʾ��ǰ���� PC���������� PC ��ʹ����ͬ�����ӶԷֲ������˹�һ�����Ա㽫��������Ϊ [-1�� 1]��2����
��Ȼ����ζ�ź�����һЩ��Ϣ��������ֱ�ӱȽ�������أ������ֵ������ʦ�������Ϣ��ѧ�������
���Ǽ����˸��� bin ���ȵ��أ�����֤���ǵķ����Ƿ�������ѡ��� bin ��С�ء�
���Ƿ��֣���ͨ��ͨ�ſ��ʱ���ػ��С������ʦ���������ߣ��������Ϣ���أ������ѧ��������ء�
�˽����ֱ�ۣ���Ϊ��ÿ���Σ���Ϣ��ͨ��������/����ʱ���ᶪʧ��
������ˣ������Զ��������ṩѧ�����ַ����Ŀ����û�з����Ŀ�ܽ��бȽ�ʱ�����ǻῴ�������˸�����Ϣ��
����ζ��˫���Զ������Դ���������Ϣ������������Ҫ��
���⣬����ȷ�������Դ��ھ����ܼ�ѹ��������������������ͨ��ͨ������ɢ�ԣ�����ѹ���ᱻ�Ŵ�
����ͨ�����Զ�������ѵ����ȥ���ؽ���ʧ��ģ������������Ա��Զ���������ʧ������ϡ����������ѧ�����ַ�����
��Ŵ��� auto-encoder ��ѹ����������ϡ����Ϣ�ռ䡣���Ƿ�����Ϣ��ѧ������������Ե����ؽ���ʧ�������
���⣬��Ϣ��ѧ���������ֵû���������죬����ζ����Ϣ��ѧ������Ѿ�����������������Ϣ���������ķֲ��ϡ�
��Ȥ���ǣ�����ѧ��������������Ϣ�ռ�������ؽ�������ܱ�������ʦ Q ������ؽ������ڰ�����Ч�úʹ����Ա�ָ����������
Ȼ���������Խϵ͵�ϡ����Ϊ���۵ģ���ӳ����Ȼ���Ե�Ч��������ּ�ڴ�����ϡ�����Ϣ�������Ի���˼���������ؽ���
������ԣ���������Ŀ�ڷ����ͷǷ������涼ʵ�������Ƶĸ�����ʧˮƽ��
ͼ 4�����ڽ�����ѧ��������ǿ�����ܡ������Ժ��Զ��������ؽ���
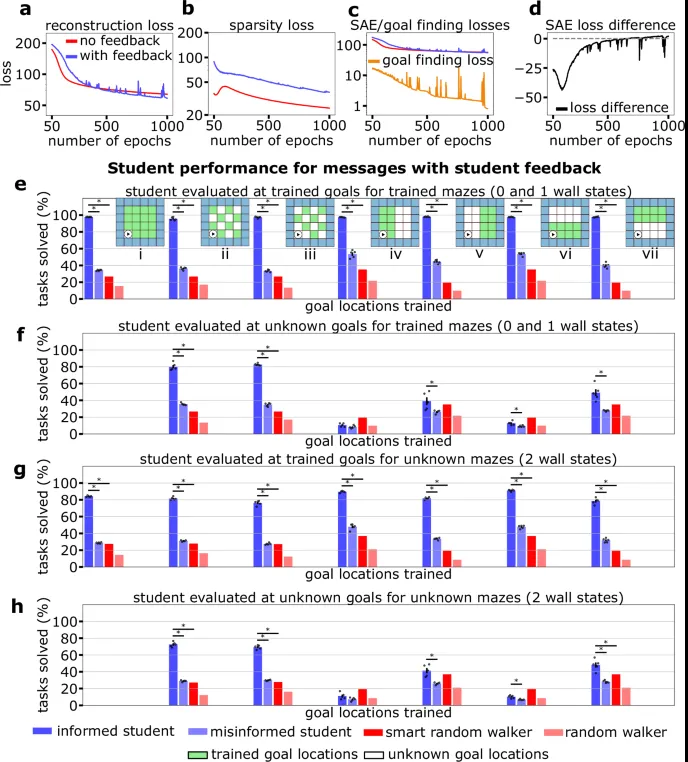
�����Զ�������ѵ����ʧ����ɲ��֣��к�û��ѧ������;��a�� �ؽ���ʧ����b�� ϡ������ʧ���Լ� ��c�� SAE ��ʧ��������ѧ������ʱ��������Ŀ�귢����ʧ��
d ��ʾ�˲��� ͼƬ����ͻ����ѧ�������Զ�������ʵ���˽ϵ͵��ؽ���ʧ��e-h ѧ����ѵ���Ͳ����Թ������еı��֡�
���յ���ȷ��Ϣ��֪��ѧ�����յ�����������Ӧ����Ϣ����ѧ����������������ߣ�����һ���Ӳ�ײǽ��������������ߣ������бȽϡ�
��һ�����������龭��ѵ����Ŀ��λ�� i�� -vii�� �����ܣ��� ��e�� �IJ�ͼ����ʾΪ��ɫ���顣�� 4 ������У����δ��� SEM ��ƽ���������ܡ��� ��e�� �У������˾���ѵ����Ŀ��λ�ú;��� 0 �� 1 ǽ��״̬�ľ���ѵ�����Թ������ܡ�
F ��ʾǽ״̬Ϊ 0 �� 1 ���Թ��� Unknown Goal Locations��δ֪Ŀ��λ�ã�����ɫ��������ʡ�g��h �ֱ������˾�����ѵ��Ŀ��λ�ú�δ֪Ŀ��λ�õ����Թ���2 ��ǽ״̬��������ʡ�
ÿ��������������ָ��ͬ���ԵIJ��죨ÿ�����ѵ���� 5 �����ԣ���ָ P < 0.05������ P ��ʹ��˫��͵��� t ���飨ʹ�� Bonferroni У�����Ӽ��������飩�ֱ����֪���������������������õġ�
��Ϣ��ѧ���ɼ���Ӱ��
Ϊ�˲���ѧ���ı��ֺͷ�������������ʹ���������������һ��״̬�Թ��Ľ�ʦ����Ϣ������Ŀ��λ�õ�ģʽ�Ӽ���ѵ��ѧ����
���ǽ��������ʶ���Ϊ�� 2����ʵ�ֵ�Ŀ��İٷֱȣ�ѡ��steps������ s��ѡ��Ӧ�ڴ���㵽�յ�����·����
����Щ�����£����ǿ��Թ۲쵽ѧ��������ѵ�����Ŀ�꼯ʱ�Ա���ѧ���������������Ϣ������������ߣ�����һ���ܿ�ǽ�ڣ��ı���������ߡ�
����ע�����ʹ����������£��������ѧ���ı���Ҳ�Ը�����������ߣ����Ǽ���������Ϊ���ǹ۲쵽������Ϣ�ij�ʼ����ƫ�ã���ʹ�ñ���ѧ���ܹ��ܿ���ǽ��
Ϊ��ȷ���Ƿ�ʵ������Ϣ��Ŀ��λ�õķ��������Dz�����ѧ����δ֪Ŀ���ϵı��֡����ǹ۲쵽��������ģʽ��ʵ������ѷ�����
Ȼ���������������������������������ı���û���������졣
����ζ�ŵ�����ռ�Ĵ���δ֪�ģ����Ҳ���������֪����֮����в�ֵʱ�����������ѵġ�
�ڽ�Զ��Ŀ��λ�ý���ѵ��������Ժõı��֣�����Ҳ���������ڱ�ǽ������ѡ�
���ⷽ�棬�������µ�ǽλ��ʱ���������ܻή�ͣ������������������������ĸĽ���
��Щ���ͻ���˵�ά������Ŀ�굼��ṹ����Щ�������Ҫ�ԣ�����ǿ��ѧ������ʵ�ֵĸı����Եĺô���
��֮ǰ�Ĺ۲���һ�£�������Ϣ����Ҫ�����Dz��Ժ�Ŀ��λ�á�
��ˣ��������峢�Խ��Ŀ��δ֪���Թ�ʱ�����ı������Ա�
ֻ�е�ѧ���������̸�ģʽ��ѵ��ʱ�����ܱ���������Ϊ������ζ�����Ѿ������������Թ������ҿ���ʹ�����ṩ����Ϣ���Լ��ľ������ֲ���Ϣ��ȱʧ��
���仰˵����������������Կ���е�����������ϣ�ͨ�Ų��ܳɹ���
����ע����������������ѧ���������ɵ����ԣ�������ѧ��ֱ���˽�ѧ�������ı�����
Ϊ��ȷ���������Զ�û��ֱ�Ӳ���������ѵ��ѧ���Ƿ����ã������о��˽�����ѵ��û�з���������½��͡����ᡱ���Ե���ӱѧ���ı��ֲ����з�����
����ע���ǰһ�ַ�������ܵ������������ʦ�����ԡ�ѧ������Ϊ���������磬����û���ݶ���Ϣͨ������ͨ��������ȥ��
���ǿ�����������������£�ѧ�������������϶��������ã����ҿ����ƹ㵽δ֪�ij�����
���ǣ��ܹ�ѵ�������Ͷ��ᷴ�����Ե�ѧ�������г����ж����ֵø��ã�����������������������
����ζ�ų�ʼ����������������ѧ������ʹ�õ��������Թ��ܵĻ�����
�ջ�
������Ȼ����ͨ�������ڷ����ߺͽ����ߣ���������������֮���ǿ���������ɻ����ԡ��������ǵ����շ������о�ѧ��ͨ�����Ա����õ�������Ϣ���ݻ��һ������Ϣ��Ч���йء�
���Dz��ǽ�������һ���ʦִ�е���������ѹ����Ϣ����������ѧ����ִ�в�ѧϰ�����ʹ�ý�ʦ����Ϣ�Լ�������Ϣ��
Ȼ����Щѧ����Ϣ���ظ������Լ������������Ƕ���Щ��Ϣ�ı��֡�
�������ֽṹ��ʾ��ͼ������ͼ 1 �п�����
��ˣ����dz��Դ���һ����ͨ�������壬ͨ�����DZ��̶ֹ�����ͬ���Ա������ṩ��Ϣ��
���ֽ���������Ȼ����ʴ��Ϣ���������ͯ��Ϸ���绰�����Ტ�ۡ�����������£�ͨ�����о���Щ��Ϣ��ͨ����ʴ����³���ԡ�
����Ҳ����ʹ����������ʶ����������֮������״�������Ϣ���͡�
���ȣ����ǿ��Թ۲쵽��Ϣ���ݵ��˻���
ֵ��ע����ǣ�ѧ�����ɵ�������Ϣ�ĵ�ά��ʽ��ζ��ѧ����Ϣ֮��IJ�����Ҫ������һ��ά���ϣ���ά�ȿ���ͨ��Ŀ��λ�úͳ�ʼ������ʶ��
������ǰ�ķ����γ������Աȣ�����ʦ����Ϣ�ռ䲻����һ����Ҫ�ɷ������ģ��ɱ���Ҳ��Ӧ��ǽ�ڵ����С�
Ȼ������ת��ѧ������������ʡ������֪��ͱ���ѧ�������յ���Ϣ����Щ��Ϣ��ͨ����ѧ�������ʦ�ṩ��Ϣʱѧ����������Ϣ���б�����õ��ġ�
��֪��ѧ���ṩ�뵱ǰ�������Ӧ�ı�����Ϣ������֪��ѧ���ṩ��������������Ϣ��
�����ܵĽǶ�����������ע���Ϣ���ݵĽ���ת��Ϊ�ϵ͵��������ʡ���ʹ���Ǿ���ѵ����Ŀ��λ�ã�Ҳ���Կ������ּ��١�
������ˣ�ѧ���ı������ڱ��������壬����ζ�Ŵ��ݵĽ�����Ϣ�����㹻����Ϣ���ܿ�ǽ�ڲ��ҵ�Ŀ��״̬��
ͼ 5����ѧ����������Ϣ���б��룬�����ǽ�ʦ��������Ϣ�������䴫�ݸ�ѧ�����ᵼ���������ܽ��͡�������ˣ�һЩ��ѧ����������������Ϣ��Ȼ���ڡ�

a ѧ����Ϣ����ѧ��������Ϣ�����ı�����Ϣ���ϵ� PCA��i�� ��ʾ PC ���͵IJ��졣ii��-iv�� �ֱ�������ǽ��λ�á�Ŀ��λ�ú�ѧ����ʼ�ж����ʱ�ǵ�ѧ����Ϣ��
b-e ��֪��ѧ����ѵ���Ͳ����Թ������еı����뱻��ѧ����������������߽��бȽϡ�
�ٴζ����龭��ѵ����Ŀ��λ�� ��i��-��vii�� ���бȽϡ����ĸ�����У����δ��� SEM ��ƽ������Ч��ÿ���������������ͼ 4 ��ͬ��
���� ��b-e�������ѵ���������� 25 �����ԣ����ų���һ���Ӽ���ָ P < 0��05������ P ��ʹ��˫��͵��� t ���飨ʹ�� Bonferroni У�����ӽ��Ͷ�����飩�ֱ����֪���������������������õġ�
�� 2 ��Ϣ�ռ����������Ŀ����ķ������

�����ɵ�ά������������Ϣ�Ĺؼ�������Ŀ��λ�úͳ�ʼ������������ˣ�ֻҪĿ����֪��֪���ѧ������ǰ��δ�������Թ������б�������Ҳ�Ͳ���Ϊ���ˡ�
������ѧ����δ֪Ŀ���ϵı���ʱ����������ѵ������δ��ѵ����Ŀ��λ�ã�����ע����ڴ��������£�֪���ѧ���ı����������������������൱��
���������Ϣ��ѧ���в���Ӱ�졣�������ƹ㵽��û�п�����Ŀ�꣬��Ϊ���ṩ����Ϣ������������������ʵ�������
���ʹ��������Ϣ�������й��������õ���Ҫ��Ϣ�����Ǽ�����δ֪������ȣ�����������֪�����в�������ȵĸ������ܡ�
���ǵó��Ľ����ǣ�ѧ�������������ص�������Ϣ����ʹ�ɼ��½���Ҳ�����������ѧ���ı��֡�
����Դ�֪��ѧ���Ľ�����п������������Ǹ��ڱ���ѧ���� ID��������ǿ��Լ���ѧ������ʹ�ý�����Ϣ�е������Ϣ��
Ȼ�������������£���ʹѧ��֮ǰȡ���˺ܸߵijɹ��ʣ���δ֪Ŀ��ķ���Ҳ��ʧȥ�ˡ�
������ˣ���Щ��������˷�����ͨ�����������������ͨ�ŵ����ڳ��ԡ�
ֵ��ע����ǣ�һ���ؼ�����������ڶ�����Ͷ�������ϵͳ��ʵ�ָ�����ѧϰ֮������Ի�ƽ�⣬�Ա�����غͿ��ƹ����Ϣ�ռ䡣
���仰˵��������������������ͨ��������ĸ����������ɵļ���Ƕ���������������������������Ϊ��ʽ��
����
������صı�����Ҫô�ڴ�������Ϊ����ϵͳ��һ���֣�Ҫô���˹��������У�Ӧ���ǿ��Է����ġ�
�����������ַ�������ִ���µ��������������ǰ�����������������в�ͬ������
���磬��ѧϰ�����г�ʱ����һ�����л�����ͬ�����г�������һ�ֽ�ͨ��ʽ����̤�峵��Ħ�г���ʱ������Ҫ����ѧϰƽ���Э��������ԭ��
ͬ�������� out-of-distribution ������˹������������Ҫ�������ڲ��������䷺�������ɹ��������
Ȼ�������������ε����������������еij�����ͨ��������õĶ�����Ȼ��һ������δ�������⡣
���������һ��ʦ�������Ķ������� RL ϵͳ����ϵͳ����������Χ�Ŀɱ��ԡ�
ֵ��ע����ǣ���״̬-����ֵ����Ƕ�뵽��ά��ʽ�п��Բ�����Ч�ij���ʹ�������ܹ��������д���ģ�͵Ľ�ʦ��������ѧϰĿ���״̬��
���⣬���ǻ�������һ���������������ͨ��Э������ʡ�
�� Tucker �������Sȡ��У����ǵ��о����������ǵķ���֮�ϣ������������ͨ����ѧϰ�������ռ��ж����ƽ��о��࣬�����ӵĻ����н�����Чͨ�š�
���⣬���ǻ������� Foerster ���˵Ĺ�������������һ�������������������ѧϰ��ģ�ͣ��Լ�һ���ڼ���ѧϰ�ڼ�ٽ�ʵֵ��Ϣ��ϵͳ��
�� Foerster ���˵ķ�����ͬ���÷�����������֮�乲���ݶ���Ϣ�Խ��ж˵���ѵ�������ǵķ�����ʹ������ͨ���������������������ѵ�������������û�й����ݶ����ݡ�
���ַ���������һ��DZ�ڵĽṹ���ýṹ���ȿ���Ŀ��ռ�Ŀɱ��ԣ��������Թ����ã���������ڽ�ʦ��ģ����״̬�ռ��ͻ�����γ������Աȡ�
ʹ�������ܣ������о�����Ϣ�ռ�ı������ʣ����а�����ѵ�е�ѧ�����档
���Ƿ������ַ�����������ܣ���������һ��DZ�ڵĽṹ���ýṹ���ȿ���Ŀ��ռ�Ŀɱ��ԣ��������Թ����ã�������ȫ���ڽ�ʦ��״̬�ռ��ͻ���γ������Աȡ�
��ˣ�ͨ�������Կ����а������ڽ�����Լ�������ǿ�����ͨ�����������ȿ��Ƕ�����ṹ�Ļش�ͬʱ������ƻ�������ؽ�����
������ ��total feedback�������������У�˵���߸��ݻ�������/�����˵Ĵ����������ǵ���Ϣ��ѧ���Զ��������ṹ����ѧ���ı��ֵ�����Ϣ�ռ䡣
���⣬����ͨ���������ڵ绰��Ϸ�ķ�ʽ����ѧ���Ŀռ��ж���ֵ��ͼ���о��������Կռ����Ҫ�Ժ������ԡ�
��������Ϣ֤ʵ��������ı���������������֮��Ĺ�ϵ����ָ�������õ������ռ�Թ������Ե���Ҫ�ԡ�
���������½������ǻ��DZ�����ijЩ���������ܺ���Ҫ�Ĺ��ܣ����磬ʹ����֪��Ϣ��������Ϣ���������������ڡ�����������������Ч��������������Ҳ�۲쵽����
�ܵ���˵�����ǵĽ��������ͨ��������Ӧ���ܹ��Բ���ķ�ʽ�����Կռ��������
��Ϊ�о��ض����ṹ����Ҫ�Կ�����;���������ʦ��ѧ����ɫ������ܶ�ǿ������Կռ�͵�����Ϣ��������Ҫ��
�����о������������������Ȼ����������֮����
���ȣ����ǵ�ϵͳ����Ч�û����溯�������������������������С����������ԡ�
������Ϣ���䲻����ʤ����Ϊ����Ϣ�ռ���Ҫ��Ӧ���ܶ�����������������
����������Ȼ���ԣ��������ظ���Ⱥ��Ķ�����Ŀ���Ч�ʶ��ݱ䡣���磬�������У��Ѿ��۲쵽Ч���ƶ����µ����Թ�ϵ����ϵij��֡�
��Σ�����ά�Ⱥ�ϡ����Լ�����ɽ���ѧ����֪���������ģ�����������С�����������
��ˣ�ͨ��Ϊ���ǵ�ͨ��ϵͳ����Ԥ����������ά�ȣ����Ǹ�������Щ���ԣ����۲쵽��Щ���Ա���֯�ɷֲ���������ģʽ��
Ȼ�������ڽ��еĹ�����Ȼּ�ڻش�ͨ����С������ռ�Ĺ�ϵ����Ϊ����ѧϰ�ʹ��Ի������������һ������ʵ�ʷ��ſռ乲���ı����еĸ�ά�ռ䡣
�о���������ʹ���ǵ����Բ�����ȫ�ǵ�ά�ģ����Ի�������Ϣ�ռ�Ҳ��ѹ���ġ�
�������о��У�����û������˳��������������ǵ���Ϣ���෴�����ǵ�Ŀ����ͨ��������Ϣ�IJ�ֵ���з�����
������ˣ��ÿ�ܿ��Ժ�������չΪ����ʹ��˳�����Ŀ������Ϣ���� Hockett �Ĺ����г�Ϊ��ģʽ�Ķ�Ԫ�ԡ������⽫��δ���о����ص㡣
���⣬����Ȼ������ȣ����ǵ�ģ��ȱ��Ԥ������������Ϊ������ص����
ͨ���������������Ϣ������ Q ������άǶ��ռ�ƫ���ڼ�Ӱ���������Ϣ��������
�����ڷ������������ӿ�ֵķֲ�DZ�ڽṹ�й۲쵽�ģ������������������������б��ֳ��Ļ��������������Ե�������֣�����Ǻ���ȷ��鳤�ಸ�鶯���������
�����������˵�����Ǽ���������������͵�·�����������������ʵ���罻ѧϰ��
ͨ��������������������������������֪����֮�������ã������ǹ̶�ͨ�Ż���Ԫ��������ˣ�Χ�ư��ݽ�ʦ��ѧ��˫�ؽ�ɫ��ͨ������������о�������Ҫ��
���漰�������в�ͬ���ͷ��ͽ��շ���Ԫ���������Լ���������IJ��ԡ����⣬����罻ͼ�����Թ�����Ӱ�첢��չ����һ��������Ҳ������Ҫ��
��ˣ��ܵ� Tieleman ���˵������������ñ�����-������ģ�����о�������ģ���Ӱ����Ϣ������δ���Ĺ���Ӧ��ϵͳ���о���ͬ��ͨ���ṹ�����磬�⽫�����ߵ�ѧ��-��ʦ�Ľ�ɫ�����˽���Ϣ�����ͨ��Ƕ����ֺʹ����ġ�
���⣬ʹ��˳������ܹ������磬�ݹ��������ת��������������ģ���صĽ�������Ȥ�����⣬������ɢͨ��Э�������ǵĹ����б��������������ã�����Ӧ�ü��ɵ��������еĿ���С�
������� Dupoux ���ܵ���������������ӿ�ֺ�����ѧϰ���о��м����ؼ���������i�� �ڼ��������ڴ�������ii�� ʹ�ÿ�������ʵ����������ִ�е���ʵ�����Լ� ��iii�� ʹ����Щ����������Ľ����Ϊ�˹����������ܵĻ���
�����������˵����Ȼ�����������ǿ�ܵ�һ���ؼ���ɲ��֣�������ǿ����������Ϊѧ�ҵ�ʵ���ԣ����ǿ��������ǵĿ���ڴ����������ݣ����о�������������صĴ��Ի��δ�����о��С�
�����������˵����Ȼ�����������ǿ�ܵĹؼ���ɲ��֣�������ǿ����������Ϊѧ�ҵ�Ч�ã����ǿ��Ժ������������ǵĿ���о�������������صĴ��Ի��
��֮������������һ��ʹ��ǿ��������ͱ��������о�����ӿ�ֵĶ�ѧ�Ʒ�����
���Dz���������������ѧ�ķ�ʽ�Դ����ǵ�ϵͳ�����Ǵ�������ʼ����ͨ��������Ϊ���϶��µı������⡣
�����ܿ����������ŷ���;�����Բ������ڸ���ͼ�����Ϊ֮������õļ��裬�Լ���Щ����ύ���г��ֵ��ڲ����ⲿ����