像蚯蚓一样爬行,猫一样地弓身,蛇一样扭曲转弯,球一样翻滚,陡然停住直立并360度灵活旋转…… 在美国加州大学戴维斯分校机械与航空工程系的集成工程实验室里,四年级学生西恩•博克哈德用他的手提电话操纵桌面上一个铝制模块,他的指导老师程辉教授在一旁解说。
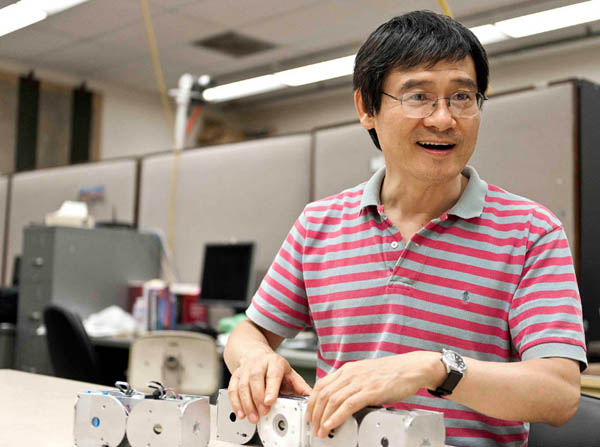
这个手掌般大小,重量逾20盎司的神奇物品,便是被誉为目前世界上最先进灵活的可组装智能模块机器人iMobot,这是从事机器人研究20多年的程辉教授和他的研究生格雷厄姆•莱兰德及研究团队花费了3年多的智慧结晶,加州大学对这项技术申请了专利。
“模块机器人并不是一个全新概念,在iMobot没有问世前,单个模块机器人只能做到前进,而我们的iMobot可以爬行、弓身、转弯、翻滚以及直立旋转360度,因此可以说我们的研究是目前最先进、最灵活的。”
实验室的大桌子上,还有两个同样的模块,程辉把3个模块或纵向连成一条,或横向并排,或交错组合,“你看,这样的随机变化组合,可以让智能模块机器人根据不同的地形执行和完成任务,也是以前的模块机器人没有的功能。”
iMobot每个模块可有4个自由度,4个马达,一块电池可以不间断使用2个小时,模块外表两端各有一个轮子,一端预留的圆孔用于安装摄像头或其他传感器。每个模块相互之间可以磁铁自动连接,用无线蓝牙进行通讯。
“iMobot可用于研究和教学,工业快速成型。另外,你设想一下,我把这么小的一个模块扔到远处,它可以根据地形爬行、转弯、站立,并360度全景拍摄画面传递回来,无论对于紧急援救、军事还是反恐,都有非常意义。”程辉说,“我们的iMobot改变了以前模块机器人只有单一功能的情况,对今后智能机器人的研究发展同样意义重大。”
奉行“有了想法就要去实现它”的程辉,已经和格雷厄姆•莱兰德把这项技术运用到实际中。他们共同成立公司,程辉为它取了一个中英文混合的名字“Barobo”,其中Ba便是中文的8,意为“幸运机器人”。该公司获得了美国国家科学基金会小型企业创新研究资助。商业化的产品外表使用铝,内部使用复合材料,拿起来更轻盈,看上去更美观,目前已经开始接受订单进行生产。
“我们下一步还要解决的就是如何更好控制多模块自动组合,”程辉说,“我开发的计算机C语言解释环境软件把程序放在手机里进行遥控,但如何自主控制远距离的多模块自动组合,我们还在继续研发。”
1977年考入浙江理工大学学习机械的程辉,大学毕业后来到美国,先后在伊利诺伊大学获得数学硕士和机械博士。在美国包裹服务公司UPS工作时,如何让机器人搬运和堆积包裹的研究曾让他获得了UPS的杰出贡献奖。1992年起就职于美国加州大学戴维斯分校从事机器人和计算机语言教学与研究,任助理教授,副教授、教授,集成工程实验室主任。
程辉坚信科学为人类生活带来巨大改变,他在研究之余,参与发起创办K-14计划,以加州大学戴维斯分校的师资在电脑、科学、技术、工程和数学(C-STEM)领域培训北加州中学教师,同时辅导那些对C-STEM学科没兴趣的学生并激发他们热爱科学。“我希望在他们身上看到下一代机器人的诞生。”