����������������ʦ��һֱ�������з��ͷ������������;������ࡣ�����ھ��������о���ʦ������ʶ�����������ٵľ����ѣ�������Ҫ��Ƴ�һ��С�����ͷ�����������Я��һ���������غɷ��У����������ܵ�ؽ��г�ʱ����ȶ����磬�⼸����һ��������Խ����ս�����������һЩ����ʦ�ǿ�ʼ�����辶��������������ȫ��еϵͳ��ת���跨������ʵ�����汾����ֻ��Ҫ�����Ƕ�һЩ�ֽš�
�������������ǵĴ��Ǹ�����װ�ʹ̼��壬�����ǵ�������ϵͳ�ڲ����������Ӵ�ֲ��缫�ȵȡ��о���Ա������������ʵ�ֶ�������ԵIJٿأ������͵õ���һ������ʬ����������ˡ�
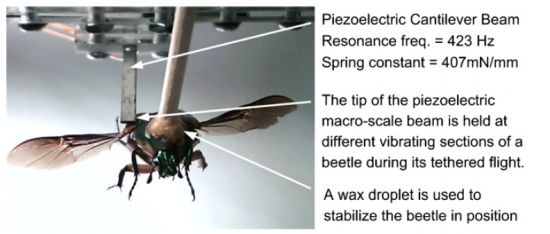
��װ��һֻ�̼׳����ϵ�ѹ��װ�õõ���115W�ķ�����
����������Ъ����ѧ���ڰ�ɭ������-����������Ethem Erkan Aktakka��˵�������ܽ�Щ�����ͷ�������Ʒ���ȡ���˳���Ľ�չ�����ǿ��ǵ����������ѧ���֣�����ʱ�䣬�غ������Լ��۳ߴ��ϵĽ������ܣ���Щ��ƶ����������֡���ʬ�������������ȵġ�����˵���������������еļ���������ս���ߵģ���Ϊ���Ǵ���Ȼ����ǧ���������õ��Ľ������
������ĿǰΪֹ��Ӧ�����������ڵIJ���ϵͳ��Ȼ�ǿ���ع���ġ���������-���������ͺ�����һ���з�����һ�ֽ���װ�ã��������������ȶ����Ķ������硣�������������������ϸ���װһ�������Ľ���װ�ã�����ѹ��ЧӦ����45W�ĵ����������о���Ա�����ţ�һ��������������������ڵ��˶�����ʵ��ֱ�����ӣ����ַ���Ч�ʽ��õ�ָ����������
�����й���һ�о��������Ѿ����������һ�ڡ�ϸ����ѧ��������־�������־�ſ�ѧ���״ο�ʼ���Բ��÷ǹ���װ�ü����ӻ������������ռ����ܡ��ڴ�֮ǰ��ѧ���������������ռ����ܵij�����ʹ���²��ż��������������·��磬�Լ�ʹ�ô�г��װ�����ռ�������������������ĵ��ܡ�����֮��̫����Ҳ��һ����ѡ��Դ�����������������Ļ���Ӧ�ñ�ᱻ�������������ĵ����⡣������ǰ�ij����з��֣���ͬ��������ڷ������Ķ�����Ƶ�ʴ��ںܴ�IJ��죬����ͬһֻ�����ڲ�ͬ������Ķ�����Ƶ��Ҳ�кܴ�ͬ����˿�ѧ���ǵó����ۣ�����ʹ�÷ǹ���װ����ƣ����������ռ��������ܶ�ĵ��ܡ�
�������ڣ���ѧ���ǿ�ʼ����������������ͳ���λ�ð�װѹ����������ѹ��Ťת������������װ�ÿ�����85-105 Hz��Ƶ���¹����������ǿ�ѧ��������ʵ����̼׳�ij���ȶ�Ƶ�ʱ仯��Χ��ѹ��Ťת��������ʾ��߷������ӽ�45 W����ѹ���������ķ��������½�Ϊ��һ�����١�������ʾ������װ�õİ�װλ�þ�������ķ��м�Խ���������ȶ��������Ļ�е��ת��Ϊ���ܵ�Ч�ʱ�Խ�ߣ���Ϊ���м����������ȳ�����Դ���ڲ���һ������Щ��ѹ��װ��֮���о���Ա�õ������115 W�ķ�������
������������˵�����ֳɵ��豸�������ǵ��Խ���ʵ�ʲ��ԣ���������ͬ������IJ�ͬ�����Ͻ��бȽϲ��ԡ���Щװ�õ�����Զ����֮ǰʹ�õĹ���װ�á����ڣ����������ȶ�����Ƶ����θı䣬����Ļ���������ջ��¶���α仯���������ܵõ��ϸ�ˮƽ�ķ���������
�����о���Ա��ָ�������֡���ʬ��������������߱����ͻ�е������ͬ���Ĺ��ܣ�����ִ��������Ӫ�������ֺ������������Լ���ը�����ȵȡ�
������������˵����Ŀǰ����������Ŭ������һ���µ���װ���������������ǵ��Խ�ѹ���մ����Ͻ���ͳ�İ뵼��ӹ�������ȥ���ʹ�ͳ�ı�Ĥ����������ȣ���һ�¼�������������������ܵIJɼ�Ч�ʡ�ͬʱ����Ҳ���ڼ���������Դ�ٳ������ݼ����Ŀ�����������������ƹ����õ��������������Ƚ���Ŀ�о��ƻ��֣�DARPA����������