
剑桥大学设计出低成本、高能效的柔性3D打印机器人手
2023-05-01,阅读:1481
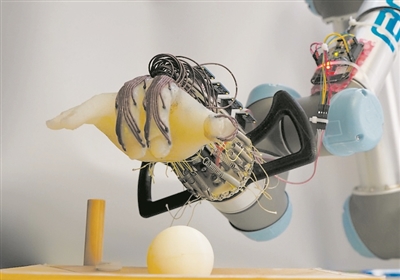
抓取不同大小、形状和纹理的物体对人类来说很容易,但对机器人来说却很有挑战性。英国剑桥大学团队设计了一种低成本、高能效的柔性3D打印机器人手,它凭手腕运动和“皮肤”感觉运作,不仅能抓住一系列物体,而且不会让它们掉落。研究结果发表在最近的《先进智能系统》杂志上。
该机械手经过训练可抓取不同物体,并能利用放置在其“皮肤”上的传感器提供的信息来预测这些物体是否会掉落。这种被动运动使机器人比全电动手指机器人更容易控制,也更节能。
研究人员表示,他们的适应性设计可用于开发低成本机器人,这些机器人能够进行更自然的运动,并且可学习抓取各种物体。
人手非常复杂,在机器人中重现其所有的灵活性和适应性是一项巨大的研究挑战。
剑桥大学工程系仿生机器人实验室研究人员试图开发解决这两个问题的潜在方法:机器人手可用最少的能量以恰当的力量抓取各种物体。
研究人员使用植入了触觉传感器的3D打印拟人化手,这样手就能感觉到它正在触摸什么。这只手只能进行被动的、基于手腕的运动。团队对机器人手进行了1200多次测试,观察其抓住小物体而不掉落的能力。该机器人最初使用小型3D打印塑料球进行训练,并使用通过人类演示获得的预定义动作来抓住它们。
机器人通过反复试验来了解什么样的抓握会成功。在用球完成训练后,它会尝试抓取不同的物体,包括桃子、电脑鼠标和一卷泡沫包装纸。在这些测试中,机械手成功抓住14个物体中的11个。
将来,该系统可通过多种方式进行扩展,例如通过添加计算机视觉功能,或者教机器人利用其环境,这将使它能够抓取更广泛的物体。

姜鎮英

陳钧铭

郭繁夏

艾红梅

陈岳云
- 新加坡国立大学仇成伟教授:意...
- 托马斯·弗里德曼:中美关系究...
- 2023美国USNEWS最佳...
- 哈佛读博 残疾中国姑娘逆袭人...
- 2023年CSC与有关国际组...
- 美国国家侦察局(NRO):计...
- 剑桥大学设计出低成本、高能效...
- 美国晨光基金会2023年奖助...
- 哥伦比亚大学与百人会联合发布...
- 2023年中国毒情形势报告...
- 2023WRWU世界大学排名...
- 为什么中国基础研究难获诺贝尔...
- 四个中立国家倒戈,转向军援乌...
- 美国安顾问沙利文在布鲁金斯学...
- 2023年全球最佳医院排行榜...
- 密歇根州立大学博士生身穿自己...
- 让HIV无法进入细胞 麻省总...
- 《天体物理学杂志快报》:全分...
- 美国西来大学陈岳云教授:40...
- 伦敦大学学院教授唐军旺院士实...
- 德国马克斯·普朗克太阳系研究...
- 谷歌科学家Natasha J...
- 中国教育部、海南省《境外高等...
- ChatGPT助力科研:智能...
- 洛杉磯西來大学欢迎您!...
- 2023年5月美国移民排期进...
- 2023年(第十五届)苏州国...
- 直接读取人类思维的机器来了!...
- 2024年度日本政府(文部科...
- 我在印度生活8个月,摘下有色...

Scholars-Net is a 501(c)(3) non-profit organization. Check payable to CAPPA, P.O. Box 236, Barstow, CA 92312, or direct deposit to Cathay Bank, 9121 Bolsa Ave., Westminster, CA 92683. Account number: 0005479070